dtof|乐动机器人激光雷达对比:DTOF激光雷达VS三角激光雷达
激光雷达作为众多智能设备的核心传感器,其应用范围越来越广泛,我们能够在扫地机器人、服务机器人、AGV叉车、工业机器人频频看到机器人的身影,足以说明激光雷达在人工智能产业链上不可或缺的地位。

文章插图
目前,乐动拥有三角测距及DTOF测距两系列雷达产品,能满足不同场景下对雷达的不同需求。那么他们有什么区别呢?今天我们就对这个问题进行解析。
三角激光雷达和DTOF激光雷达原理概述VS
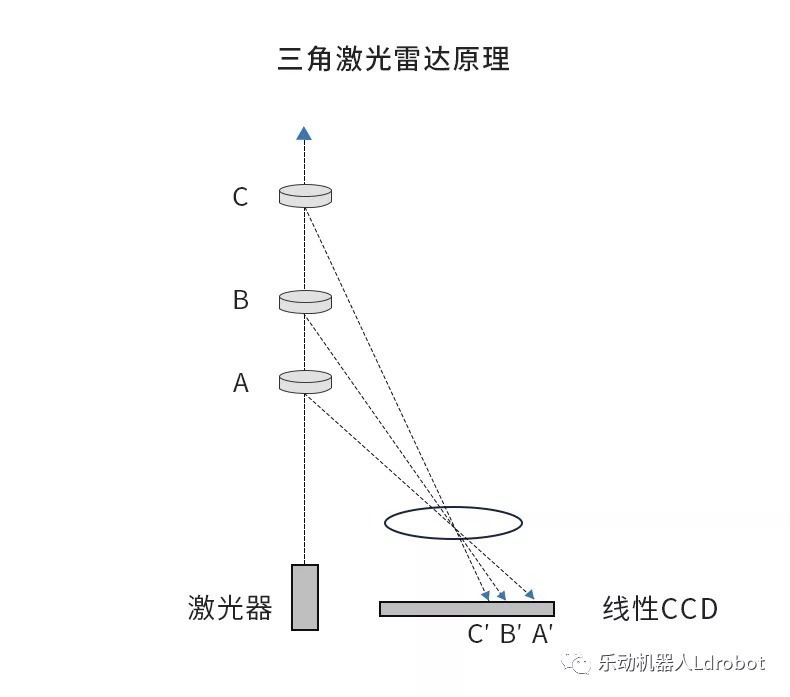
三角激光雷达的原理如下图所示,激光器发射激光,在照射到物体后,反射光由线性CCD接收,由于激光器和探测器间隔了一段距离,所以依照光学路径,不同距离的物体将会成像在CCD上不同的位置。按照三角公式进行计算,就能推导出被测物体的距离。
文章插图
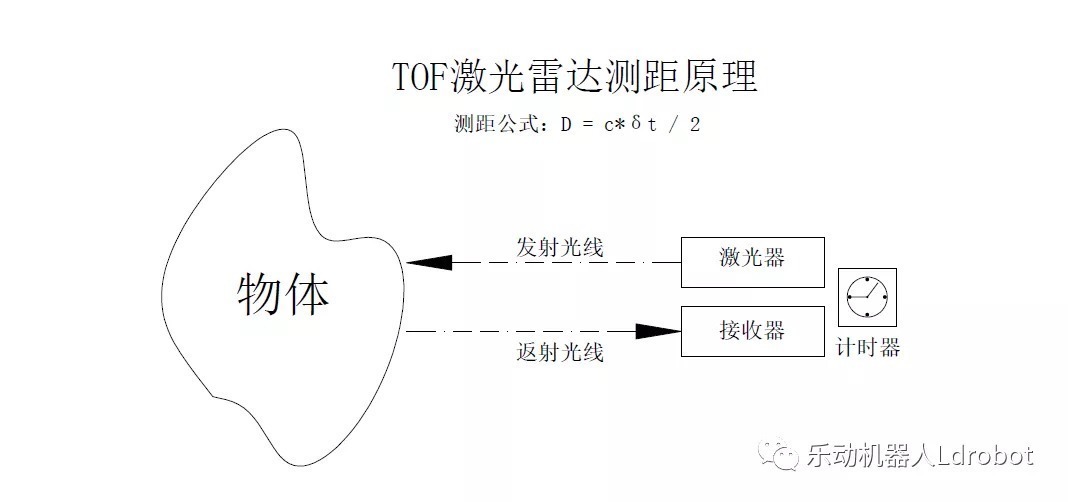
DTOF是Direct Time of Flight的缩写,即飞行时间测距法,激光雷达内的激光模块发出经调制的脉冲激光,遇到物体后反射,通过计算激光发射到接收之间的时间差,来换算被测物的相对距离,DTOF测距精度高、测距远、响应快的优点。
文章插图
三角激光雷达和DTOF激光雷达性能 VS
从用户的角度出发,用户最关心的两点:产品的功能和价格。先说性能,如果了解这个行业的人大多知道,DTOF激光雷达的性能在大部分的场景下是优于三角激光雷达的。

文章插图
1.测距范围
DTOF激光雷达的范围是0.03-12m,三角激光雷达测距范围0.12-8m,产生差异的原因主要是测距的原理不同。
2.测距频率
激光雷达扫描环境时,输出的是点云图像。每秒能够完成的点云测量次数,就是测距频率。三角激光雷达的测距频率一般都在3000Hz以下, DTOF雷达可达4500Hz。究其原因,DTOF完成一次测量只需要一个光脉冲,实时时间分析会很快响应。但是三角雷达需要的运算过程耗时则更长。

文章插图
3.精度
三角激光雷达在近距离下的精度很高,但是随着距离越来越远,其测量的精度会越来越低,这是因为三角测距的测量和角度有关,而随着距离增加,角度差异会越来越小。
所以三角激光雷达在标注精度时往往都是采用百分比的标注(常见的如1%),那么在20m的距离时最大误差就在20cm。而DTOF雷达是依赖飞行时间,时间测量精度并不随着长度增加有明显变化,因此大多数DTOF雷达在几十米的测量范围内都能保持几个厘米的精度。
【 dtof|乐动机器人激光雷达对比:DTOF激光雷达VS三角激光雷达】整体来说,DTOF激光雷达的性能相较于三角激光雷达更加优越,应用于扫地机器人、服务机器人、AGV/AMR、农业机器人等领域。
- TCL|打破日本30年垄断历史!中国工业机器人减速器终于熬出头了
- 字节|字节跳动四款新产品齐发:元宇宙社交“派对岛”、悟空搜索、游戏社区“灵选”和机器人
- 问答|元宇宙、搜索、游戏社区、机器人,字节跳动急寻第二增长点
- https|机器人首次独立手术!最快55分钟缝合肠道,“结果优于外科医生”
- 机器人|未来十年这十个实体行业可能会消失
- 机器人|售价10万“妻子机器人”,除了生育不行,其余都可以做?是智商税吗?
- 我造了九年机器人,感受到中国制造业的转型渴望|中国新工人
- 本文转自:东方网东方网记者曹磊1月31日报道:随着北京2022年冬奥会和冬残奥会渐近|以科技为冬奥保障助力 智能“哨兵机器人”已就位
- 波士顿动力的Stretch机器人在DHL仓库获得了自己的第一份工作
- 场馆|紧锣密鼓|智慧冬奥安保机器人上岗