https|机器人首次独立手术!最快55分钟缝合肠道,“结果优于外科医生”
杨净 发自 凹非寺
量子位 | 公众号 QbitAI
没有人类指导,机器人自己就完成了手术?!
结果还显著优于外科医生。
文章插图
最近,有这样一项实验引发了大家关注。
美国约翰·霍普金斯研究团队设计研发的手术机器人STAR,在猪的软组织上首次独立完成腹腔镜肠道吻合手术——重新连接肠道的两端。
研究人员表示, 这是朝着对人类进行全自动手术迈出的重要一步。
来看看这究竟是甚么回事?
CNN跟踪软组织运动一直以来,软组织手术对机器人来说尤其困难。
且不说要求机器人高精度操作,还有各种不可预料的意外情况需要应对决策。
而在腹腔镜手术中,这种难度进一步增加。因为可操作的空间有限,且目标组织会有呼吸运动的伪影干扰。
即便是最轻微的震动或错位缝合,都可能给患者带来严重的并发症。

文章插图
机器人STAR,从诞生之日起,就是专门用于缝合软组织的视觉引导系统。团队为其配备了专门的缝合工具和成像系统,以保证手术区域可视化。
从结构上看,STAR由两个医用机械臂、电动缝合工具,以及NIR(近红外成像)摄像机和一个3D单色内窥镜组成。

文章插图
这个机器人最大的特点,就是以最少的人工干预来规划、调整和执行软组织手术。
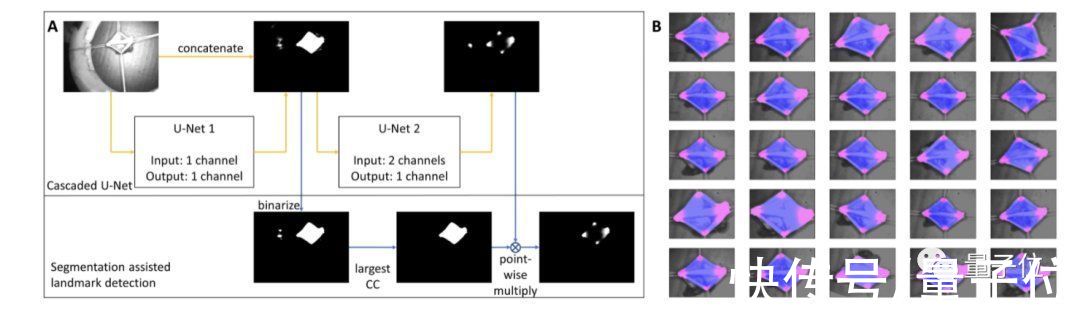
为实现这一点,研究人员开发了基于结构光的3D内窥镜和基于机器学习的跟踪算法来指导STAR,用来规划缝合。
文章插图
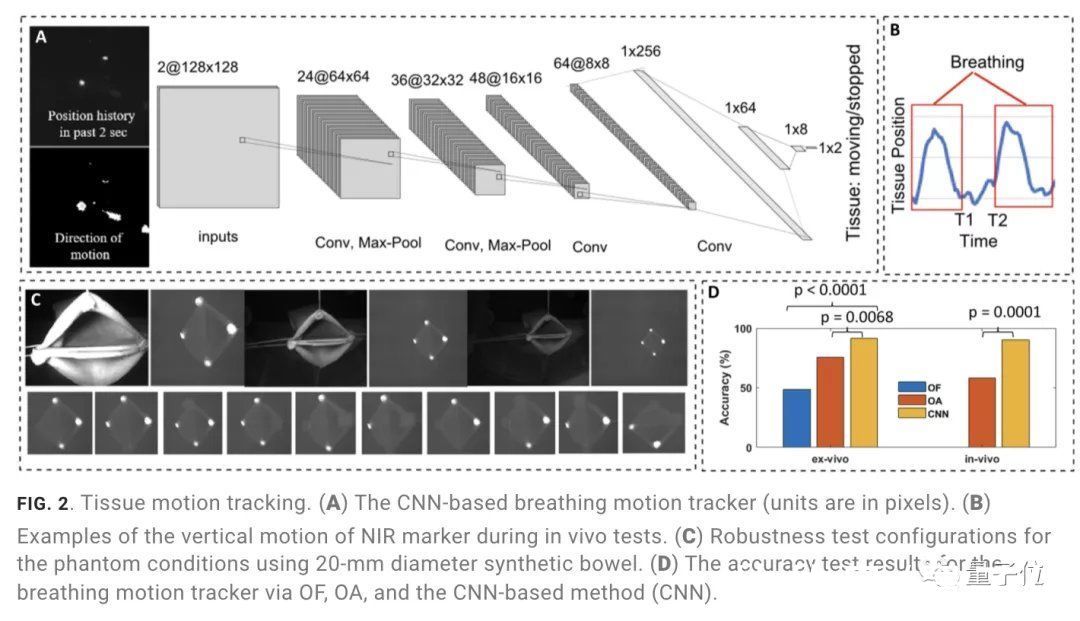
目标跟踪算法使用了卷积神经网络CNN,基于U-Net架构,输入包括近红外摄像头标记的过去 2 秒内的位置历史以及从现在到2秒前的运动方向。
文章插图
整个网络涵盖4个卷积层、3个密集层和2个输出。
卷积层和前三个密集层的激活函数是 Rectified Linear Unit (ReLU),最后一个密集层的激活函数是SoftMax。
该网络在训练阶段预测运动曲线,准确度达93.56%。
除此之外还有许多自主功能,包括启动/暂停/解除组织跟踪系,检测软组织的呼吸运动及其变形,控制摄像机运动,缝合规划、预测工具与软组织碰撞等。
如果 STAR 检测到与当前手术计划相比组织位置的变化大于3mm,则通知操作员启动新的缝合计划和批准步骤。
接着,操作员就只需看着机器人操作了。
在这项缝合任务中,超过83%的工作流程都是机器人自主完成的。有时候仍需要操作员手动微调机器人,以便出现漏缝时纠正定位。
文章插图
(相机放置在距离目标组织 5 到 8 厘米处)
以往的工作中,组织追踪仅考虑静止组织,没有考虑到呼吸运动,包括噪声预滤波和碰撞预防,也无法自主形成重新规划建议。
操作员需要监测缝合过程的每个子步骤,因此只有57.8%的缝合工作是机器人自主完成的。
最终结果显示,STAR在四只动物身上进行了同样的手术,整个手术时间大概在4小时,结果均显著好于人类。
尤其在位置校正、缝合间距、缝合线咬合大小、完成时间、管腔通畅和泄漏压力等维度,均好于目前已开发的自主系统、专家手术等。
在完成时间上可以看到,最短在1小时之内就已经完成。

- 机器人|未来十年这十个实体行业可能会消失
- 机器人|售价10万“妻子机器人”,除了生育不行,其余都可以做?是智商税吗?
- 我造了九年机器人,感受到中国制造业的转型渴望|中国新工人
- 本文转自:北青网#神舟十三号航天员在太空遥祝大家新春快乐#【#中国人首次在太空迎新春过大...|神舟十三号航天员在太空遥祝大家新春快乐
- iOS16系统界面首次曝光,据说会有大改!
- 本文转自:东方网东方网记者曹磊1月31日报道:随着北京2022年冬奥会和冬残奥会渐近|以科技为冬奥保障助力 智能“哨兵机器人”已就位
- 波士顿动力的Stretch机器人在DHL仓库获得了自己的第一份工作
- 航天员|中国人首次在太空迎新春过大年
- 场馆|紧锣密鼓|智慧冬奥安保机器人上岗
- 北京冬奥会|盘点冬奥会上的“硬核科技”:餐饮机器人、智慧医疗、智能床……