在城市里开车,最困难的是哪个部分?
不是拥挤的交通、不是错综复杂的路口、甚至不是蛮横无理的夹塞儿,而是停车。

文章图片
停车的难相信大家都体会过,高达8000万的车位缺口,让找车位本身就变得十分困难,据数据显示,有超过25%的驾驶者表示曾经因争抢车位而与他人发生争执;同时各种非标准的狭窄、奇葩车位无时无刻不在考验人们的驾驶技术,就算经历千辛万苦停好了车,也极有可能面临在偌大的车库里、大海捞针式的寻车,以及关注数个公众号后才能顺利缴费出库的繁琐流程。
于是乎”今天不开车,没地方停。”成为了很多人的口头禅,停车场景(即自动泊车)也成为消费者期待最先实现无人驾驶技术落地的场景。
完美的泊车需要几方协同?要想实现一次完美的自动泊车,并不容易,至少需要两方协同——车和停车场,
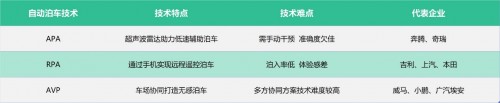
先说车的问题,车位狭窄深深的考验着司机们的停车技术。而最早普及的泊车辅助系统叫做APA自动泊车。 在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位,全程都需要驾驶员在车内手动干预,并且准确度和识别率不尽人意。
随后出现的是将泊车与道路、手机结合的第二代RPA远程遥控泊车,带来了更好的车位识别能力,同时很多车具备手机启动泊车功能,在车外不远处使用手机发送泊车指令,控制汽车完成泊车操作。比如吉利、上汽、本田等车端智能玩家们,目前都采取这样的方式。
但在市场上,由于车位难找、泊入率、遥控距离等问题,RPA的用户真实使用率也不高、产品的体验感较差,同时车辆也无法完全“脱手”,离用户心中的完美泊车相去甚远。
在场端,目前国内比较有代表性的应该是ETCP、捷顺等停车场服务商,他们通过蓝牙物联网技术对停车场进行数字化改造,实现车位的空忙闲智能管理和自动化停车费结算,劣势也相对明显——系统封闭、各自为政。为了抢夺市场占有率、这些服务商往往对车场采用垄断式的合作模式,同时缺少车端的加入,即便系统再完善,也只能实现场端的泊车体验部分优化。
打通车端+场端、实现智慧停车生态闭环消费者心中的自动泊车,是有专业的代客泊车解决所有的问题:当你下班后疲惫的驾驶车辆去一个大型商业体赴宴,出发前就可以提前了解一个附近停车场的相关情况,并选择一个作为导航的终点,进入停车场后无缝切换,可以直接在商圈门口下车,吃饭、看电影,最终再召回车辆、无感支付顺利出库。
而要实现这些,势必需要打通车端+场端。
AVP这一技术路线,就打通了两方,主要包括车端智能、场端智能、车场协同。由车承担感知、定位、规划、控制等全部功能,场端智能是指由场端负责感知、定位、决策等,车辆仅负责运动控制;车场协同则是车和场各自负责部分感知和定位功能,车辆负责路径规划和运动控制,同时又由统一的云平台负责车位分配和停车路径规划。车辆基于高精地图和自身的能力,可以导航到非固定车位并自主泊入,相比其他泊车系统,AVP能更切实地解决用户的痛点。
文章图片
当然,目前AVP仍处于发展阶段。代表性的企业威马汽车,刚刚上线的威马“智慧停车”功能,初期用户提供出发前目的地停车详情查询,包括地址、开放时间、收费、车位空闲等信息,支持覆盖全国7000个停车场车位空闲数、收费标准等相关信息。
- 一加科技|ColorOS 13测试招募已开启,多款旗舰可体验,稳定版不远了
- 高通Wi-Fi 7方案中的“高频多连接技术”到底有多强?
- 8个包子120元的天津狗不理终究还是成为了“狗都不理”,昔日风光无限,为何来到今天这个时代却无人问津
- 一加科技|一加AcePro首发评测:参数体验双赢原神竟优化到3.0?
- 阿斯麦尔|外媒的“猜测”被推翻?ASML传来新消息,中芯国际真的白费了!
- 小米科技|小米新折叠屏外观曝光,苹果电量显示回归上热搜
- 世界机器人|工信部将加快实施“机器人+”应用行动
- CPU|“淘宝之父”孙彤宇和“支付宝女王”彭蕾移民了!
- UC浏览器|开始了“内讧”?中科院遭到抵制,官方回应来了!
- 芯片|国产GPU芯片“每秒千万亿次计算”