探测|激光雷达眼中的世界:点云与时间的艺术
看到这个标题可能会有读者好奇,为什么一篇主题为激光雷达的文章会发布在家电分类而不是汽车等其他分类。正如这个行为本身所代表的,日渐丰富的家电品类和功能正在对主动感知、主动反应能力提出更高需求,也逐渐产生了家用服务机器人这个新子类。作为此类产品一个十分显著的特征,对于移动、感知等等,简而言之是能够全方位适应家庭场景的行动能力需求,使其面临着与当下热门的自动辅助驾驶汽车十分相似的技术环境。

文章插图
??当然,与市面上的不少智能化汽车一样,家用服务机器人中也存在不搭配激光雷达的纯视觉方案,但从我们近期的一些实际体验来看,激光雷达所具有的精确建图能力,确实能够为扫地机器人等产品提供更好的路线规划基础,这与激光雷达的基础原理有关。
??激光雷达,从原理上说就是一种dToF(直接测量飞行时间)方案,通过激光发出和返回的时间结合光速计算出距离,与其它使用调制光/电磁波,并检测相位差的间接飞行时间方案相比,具有探测距离远、精度高的优点。缺点在于检测点和扫描区域较为固定,要想克服这种缺陷,就需要增加更多激光源组成阵列,以及增加旋转轴、振镜等活动部件,使激光束能够以一定的周期覆盖更大范围,同时以一定的频率接收返回信号,由此带来了激光雷达眼中世界的构造:点云。
文章插图
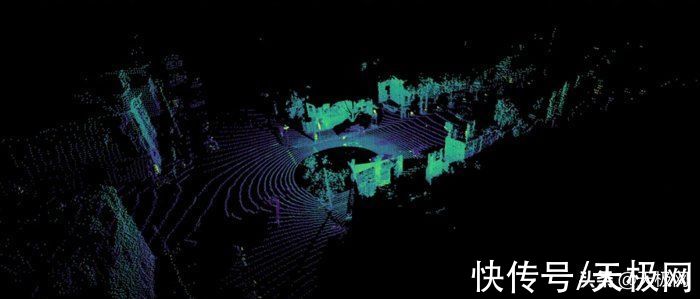
??车载激光雷达的点云,可以看到点云在地面上组成了“等距线”
??可以类比将一块地区所有海拔相同的点连成线组成的等高线地图,密集的点云本质上是探测主体周围所有激光能直接到达的位置与主体间的距离,并由此为轮廓描绘出周围的环境。探测的效果则取决于激光雷达方案的扫描频率与角分辨率,越高的扫描频率也就是越短的扫描周期,可以使激光雷达能更直观地反馈探测主体移动带来的变化,以及周边环境本身的变化,这对于智能汽车的自动辅助驾驶功能十分重要。
??垂直和水平两个方向角分辨率则影响到点云数据的精细程度,具体而言就是能够在多远的距离探测到多小的物体。可以想象整个工作周期中激光束以激光雷达为原点向四面八方射出,每隔0.5°或1°接受一个点的距离信息,自然在越近的距离上点越密集,越远则越稀疏。
文章插图
??但来到扫地机器人等家庭服务机器人的领域,则不必苛求更高的硬件规格以及探测性能,这同样源于两个因素。一是家庭等室内环境本身是倾向于维持不变的,我们不会像路面交通一样频繁移动室内的家具、更改墙的位置,因此对激光雷达而言实时更新周边环境变化的需求不那么大,几乎仅限于避开人、宠物等的活动。不过激光雷达的周期性扫描在室内环境中有一个新用途,那就是确定自身的位置,将不同位置扫描获得的点云进行叠加对比,结合行动部件的运作记录,能够实现在家庭等小尺度环境中的精确定位。
??二也是前面提到的,家庭环境是个相对更小的尺度,扫地机器人等的激光雷达无需那么高的水平角分辨率,也足以完成建图、定位的任务,而在垂直方向则很多时候完全不必要。扫地机器人不需要户型、距离以外的太多环境信息,因此通常装备在机身最高处的一台激光雷达即可完美达成探测户型,确定限高区域的任务。

文章插图
??以上是红外摄像机下某设备顶部激光雷达的扫描线,可以看到它仅需对水平方向进行扫描获得一片“二维平面”的点云,也就是2D户型图,便足以支持其完成工作。
- 数字雷达|德心智能与数字雷达技术企业Uhnder合作
- 彩电业开年即遭“高开低走” 激光电视为何能一直逆势增长?
- 绿色|100英寸省电60% ,绿色健康客厅选激光电视
- |超强激光照射石墨烯实现高能离子加速
- 本文转自:北京邮电大学出版那么到底发生了什么事?在经历了10年野蛮成长的人类太空探险之后...|探测太空的新技术
- 激光电视|一英寸影像猛禽手机是它!售价万元,信仰的价格吗?
- 投影仪|家用买激光电视还是投影仪?一文看懂二者本质区别
- tsk|高端工业应用超精密激光设备研发商镭明激光完成数亿元C轮融资
- 工业机器人|欲为入门激光电视正名:明基i930L凭什么?
- led光源|家用买激光电视还是投影仪?一文看懂二者本质区别