文章插图
图:机器人在没有人类帮助的情况下对猪的软组织进行了腹腔镜手术
文丨学术头条,作者丨XT,编审丨寇建超
近几年,医疗市场对于手术机器人的需求持续增长,国内外多家巨头企业纷纷布局手术机器人市场,达芬奇手术机器人原一家独大的垄断局面逐步被打破。在资本的推动下,手术机器人在技术上不断取得新的进展,胸腔和腹腔镜手术机器人技术逐步成熟。
腔镜手术机器人被誉为“医疗器械领域的航空母舰”,是目前手术机器人领域系统极为复杂、技术难度极大、临床与商用价值极高的研发方向之一。尤其是在腹腔手术中,由于目标组织的进入和可见度有限,加上呼吸运动造成的伪影干扰,手术难度极大。
近日,来自约翰·霍普金斯大学的一个研究团队设计出一款智能组织自主机器人 STAR,该机器人在没有人类指导的情况下,成功完成对一头猪的软组织腹腔镜手术。
文章插图
相关研究以“Autonomous robotic laparoscopic surgery for intestinal anastomosis”为题,发表在科学期刊 Science Robotics 上。
该研究实现了使用智能组织自主机器人(STAR)执行机器人腹腔镜小肠吻合术所需的增强自主性,并且能够在腹腔镜下实施增强的全吻合自主操作,标志着机器人技术向人类全自动手术迈出的重要一步。
该研究的作者之一、约翰·霍普金斯大学怀特工程学院机械工程助理教授 Axel Krieger 说:“我们的研究结果表明,我们可以将外科手术中最复杂、精细的任务之一实现自动化——重新连接肠道的两端。STAR 在四只动物身上进行了手术,明显比医生进行同样的手术效果要好。”
首个在软组织中完成吻合术的自主手术机器人【 吻合术|全球首次:手术机器人自主完成猪体内腹腔镜手术】外科手术机器人的发展已有多年,但多以辅助型手术系统为主,如处于世界尖端水平的达芬奇手术机器人,由外科医生控制机器人辅助进行手术,系统虽具有极高的精准性,但在实现自主手术上仍面临相当大的挑战。
自主软组织手术要求手术机器人具备准确可靠的成像系统,从而检测和跟踪目标组织,还需考虑软组织变形给手术带来的复杂度增加等因素,对机器人系统要求较高。腹腔镜手术就是一个典型的应用场景,由于目标组织的进入和可见度有限,加上呼吸运动造成的伪影干扰,导致手术难度极大。
在外科手术中,吻合术恰好是考察自主机器人手术系统进行软组织手术的一个合适场景。该手术的目的是将软组织的两个断端接起来,恢复连续的生理结构,如胃肠道吻合术、输卵管吻合术、肌腱吻合术等。在技术上,涉及腔结构的近似和重建,对手术的可操作性和可重复性要求极高。
尽管现有的自主手术机器人已取得明显进步,但多数系统在复杂任务中仍表现出较低的自主性,对医生的依赖性较高。
在该研究中,Axel Krieger 等人设计了一款面向腹腔镜手术场景的增强型自主 STAR 系统,并配备了专门的缝合工具和最先进的成像系统。成像系统使用近红外标记,可跟踪目标组织缝合过程的起点和终点,在手术过程中对血液和薄组织的闭塞具有较强的鲁棒性,系统的自主性和手术精度得以增强。
文章插图
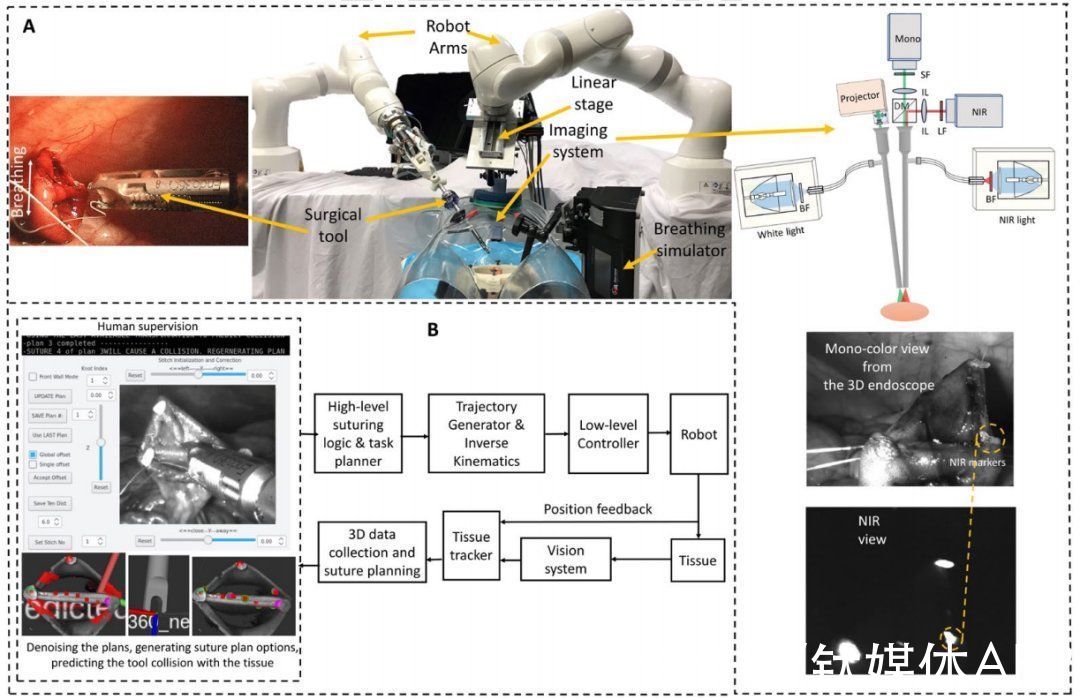
图 | 加强自主腹腔镜软组织手术(A:STAR系统的组成部分,包括医疗机器人手臂、驱动的手术工具以及双通道近红外和三维结构光内窥镜成像系统;B:STAR的增强型自主控制策略的控制架构)
- 全球前十大“芯片”买家,苹果一年要花4300亿,华为排名第七!
- LG|数码行业年度笑话!连环骚操作惹怒全球用户,LG真有你的
- Java|华为花瓣搜索,上线不到一天就被封!是宣传手段还是技术不过关?
- 欧盟|欧盟将公布晶片法案目标2030「全球市占率20%」
- 产能|全球芯片市场“洗牌”,国际巨头登顶第一,台积电的地位被取代?
- 三星|2021年全球笔记本电脑出货量又创新高,联想继续保持领先!
- esl|华林科纳关于LTCC技术中微波集成电路的封装报告
- 网络技术有限公司|阿里、美团入股华芯盛景创投中心
- 新能源|华为开源,“风鸿”集控系统发布,击碎新能源技术壁垒
- 穿戴设备|奕东电子:公司生产的FPC已应用于全球前五大手机终端品牌