ces|Mobileye 真的不行了吗?( 四 )
算力高效利用的关键——RSS 责任敏感安全原则
无论是 CES 的发布会上,还是会后的采访中,Mobileye 都反复强调了「不以算力为唯一标准」和 「相比算力,效率、软硬结合同样重要」的观点,为了让所有更加信服,Shashua 也分享了一些技术上的细节。
文章插图
这里我也试图用尽量简洁的文字,把我所理解的分享给大家,如果有偏差欢迎指正。
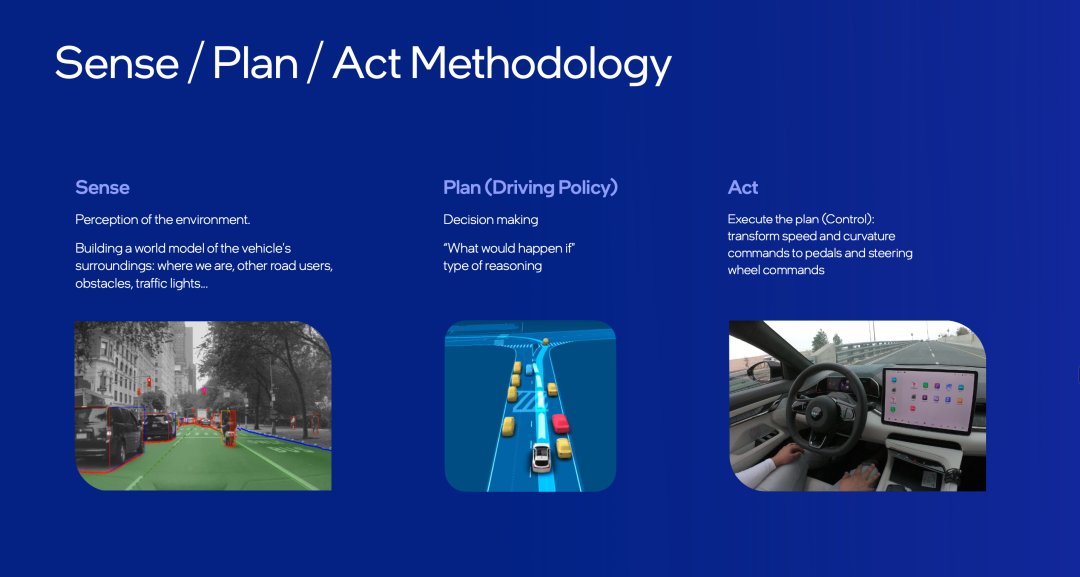
实现自动驾驶需要三步,感知 — 决策 — 执行,听上去这个复杂的工程就像把大象塞进冰箱一样简单。
其中最耗费算力的是「感知」和「决策」两个环境。
文章插图
感知层面,为了提升感知能力,摄像头的数量在不断增加,分辨率也在不断提高,背后产生的数据也在以指数的形式增长。
为了更加高效地利用算力,Mobileye 在获得视觉感知信息后会先进行场景分割(scence segmentation NSS),优先计算路面信息,而不是盲目地全局处理。
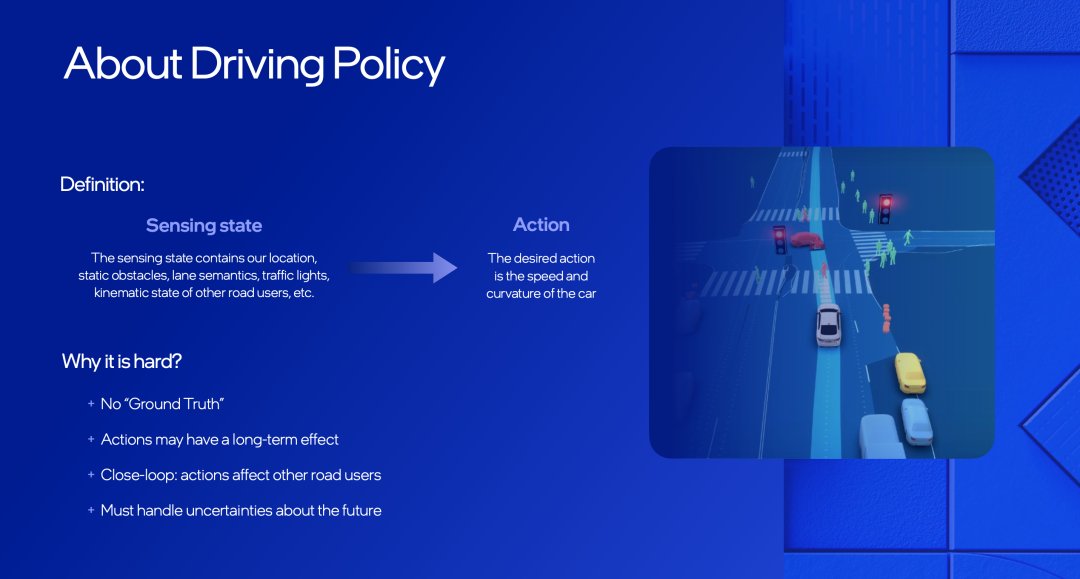
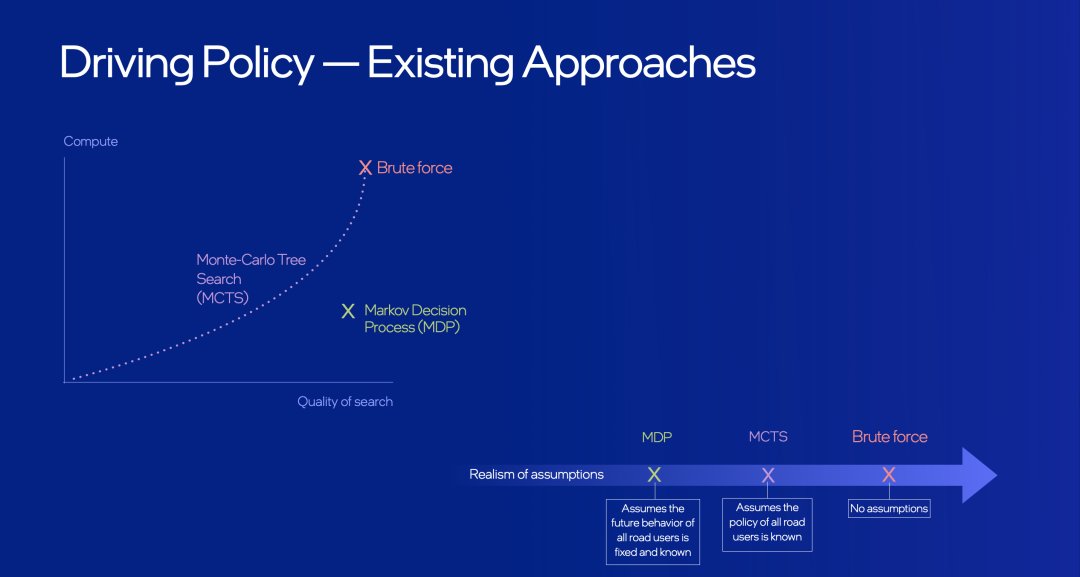
决策层面,最花费算力是基于感知的信息对周围的交通参与者的行进轨迹进行预测,然后决策出一条合理且安全的路线,但是一旦涉及到预测,随着预测的未来时间越久,对算力的需求就会进入指数级增长的过程。
文章插图
文章插图
在这里 Mobileye 引入了 RSS (Responsibility Sensitive Safety)责任敏感安全原则,目标是通过数据化人类驾驶中,比较具有主观性的几个常识确保自动驾驶汽车永远不会主动导致事故发生,包含:
1、什么是危险情况?
2、什么是危险情况下的正确反应?
3、谁要对事故负责?
4、不同驾驶场景下的安全距离。
Mobileye 会基于以上驾驶策略去归纳计算,所以基于 RSS,系统只会去计算有可能的未来,而不是所有的未来,这样的逻辑下帮 Mobileye 更高效地利用算力。
而上述的这 3 大技术,将会支撑 Mobileye 更好地攻下 L3/L4 的场景。
根据 CES 发布的信息来看,在 L3 层面 Mobileye 已经与本田和法雷奥展开了合作,其中 Mobileye 负责视觉感知。
在 L4 层面,Mobileye 的 Robotaxi 将于 2022 年中开始进行路测,年底获批后,会在德国和以色列进行主驾无人的测试,实现真正的无人驾驶,届时一辆车的成本预计是 15 万美元。
消费级的 L4 将在 2024—2025 年推出,不同于 Robotaxi 的是,消费级 L4 可行驶范围更广的区域,但是系统非常依赖 REM,同时零售价格 1 万美元,成本预计低于 5,000 美元。

文章插图
在 Mobileye 看来,Robotaxi 和消费级 L4 并不冲突,Robotaxi 更早的投入可以帮助 Mobileye 有价值的数据,而消费级 L4 可以通过规模化实现降本。

文章插图
以上就是 Mobileye 在今年 CES 上透露的全部信息,不可否认的是 Mobileye 多年的积累在视觉技术上仍然具备绝对的领先优势,在我们 42Mark 的测试上可以看出,搭载 EyeQ4 芯片的车型都具备不错的基础能力,在我们与车企 ADAS 负责人交流时,他们也坦言 Mobileye 感知结果的质量非常高。
但也因为感知算法是黑盒子,无法满足车企自研向上的需求,所以丢失了大量头部车企的订单,也有业内人士向我们透露,相较于 Mobileye,英伟达和地平线提供的完整开发工具更有利于车企实现算法自研,同时沟通效率也更高。
- 锐龙|iOS15.2.1真的不好用吗?重度使用两天后,已升级用户都这样说
- 打印机|网传佳能珠海“终止公司生产”公告 有内部员工称“是真的,已停止上班”
- 珠海|2022 CES索尼加入Mini LED阵营!提前布局的TCL成最大赢家
- 年货|下嫁保安,离婚被卷走141亿的三星公主李富真,真的不亏
- 一加科技|一加10 Pro又卖爆了,它真的好用吗?看首发用户怎么评价
- 腾讯会议|马化腾又上了热搜!称腾讯是普通公司,网友:真的是人间清醒
- 阿里巴巴|弘辽科技:多多进宝你真的会操作吗?
- playstation4|不要破解,否则ps4Pro画质真的太差了
- 三星|CES 回应三星等公司员工感染新冠:无法确认病例数量
- iOS15.2.1真的不好用吗?重度使用两天后,已升级用户都这样说