算法|毫末智行让自动驾驶决斗走向数据智能 特斯拉FSD迎来国内劲敌( 三 )
当毫末智行亮相MANA的时候,特斯拉的数据智能体系还是第一次被国内自动驾驶公司对标。
文章插图
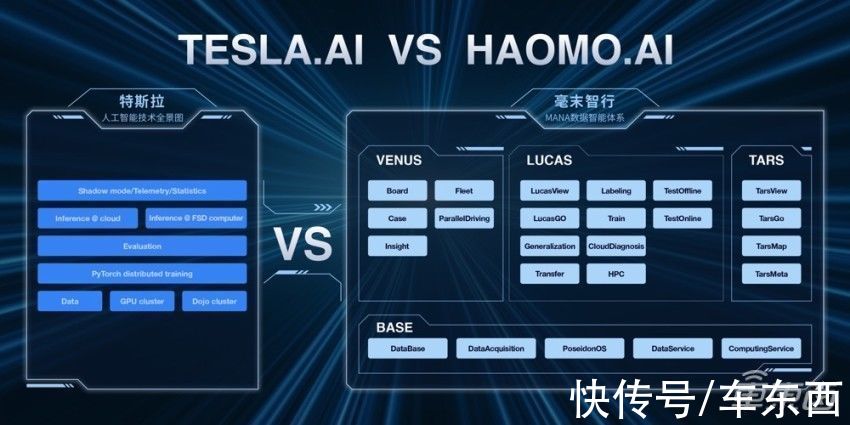
特斯拉与毫末智行的数据智能体系对比
实际上,特斯拉和毫末智行的数据智能体系有着明显的区别,尤其是在感知层面。
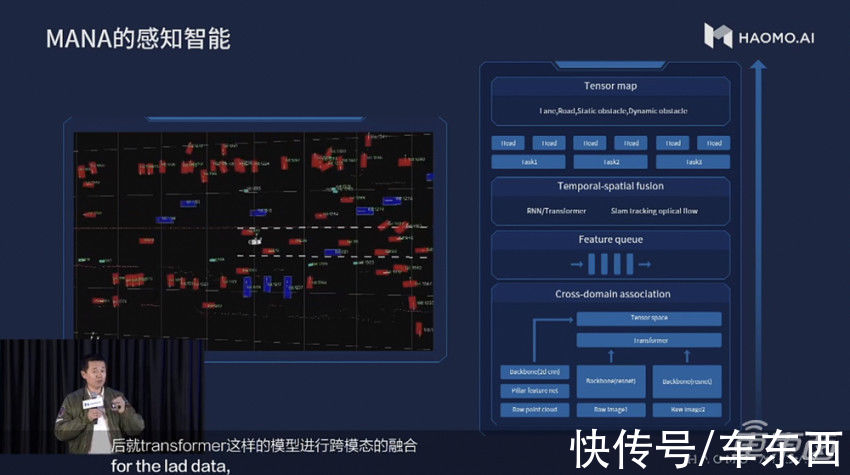
作为自动驾驶的第一步,MANA的感知将融合摄像头、毫米波雷达、激光雷达等多种传感器的数据。当前业界大多采用后融合的方式,但造成的结果是时间上的不连续和空间上的割裂,导致融合效果并不出色。
文章插图
采用后融合的MANA感知智能
然而,传感器种类、数量同时增多的今天,毫末智行正在着手研发的前融合技术,在对感知数据预处理之后直接融合,感知将更加连续、全面。
顾维灏介绍,在算法结构上,摄像头的数据经过基础处理后,就会使用Transformer算法,将多个传感器感知数据融合在一起。同时,毫末智行也采用RNN算法或光流SLAM的方式,将时间的特性加入到空间中。在这之后,再进行目标提取等感知运算。
用这种方式,能够让传感器对世界的感知更加连续也更加全面,从而提升感知的准确率和对现实的刻画能力。
三、瞄准认知智能 还能在元宇宙里做仿真除了感知智能之外,MANA还在认知、标注、仿真、计算能力上拥有更多革新。
在感知到车辆周围场景之后,下一步就是实现认知智能,通俗点说就是让自动驾驶更像人一样,以安全、舒适、高效的方式完成驾驶动作。相对于感知层面明确的标准,认知层面的参考标准变成了三个,这就带来了非常多的困难。
顾维灏说道:“如果有三个目标的时候,就难以有全局最优解。”
人类开车习惯是怎样的?驾驶员在遵守规则、常识的基础之上,智能地选择自己的驾驶行为。一句话总结来说,人类的驾驶不是一个数学问题。
文章插图
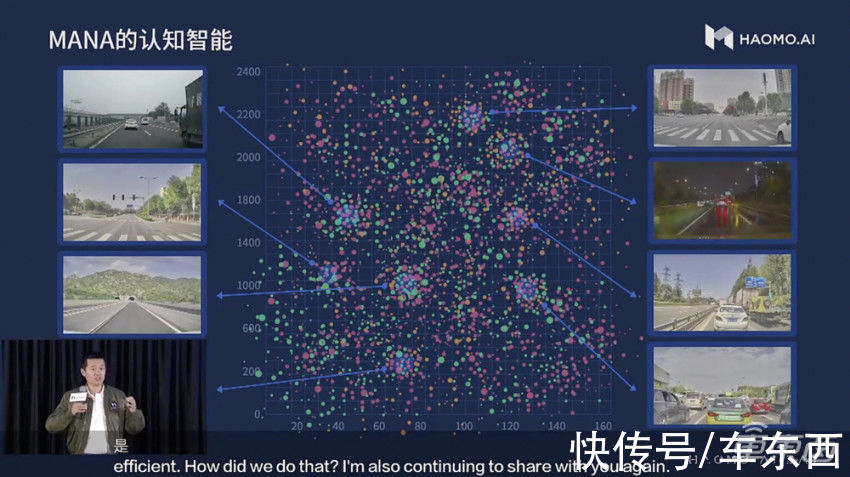
MANA认知智能
因此,当把自动驾驶简单转化为数学问题求解,可能永远得不到最优的自动驾驶算法。
此时,自动驾驶系统具备认知智能就有了明确的意义。毫末智行采用全栈自研安全认知模型CSS,充分考虑从数据中学习到的对其他交通参与者行为的理解和超时空的历史经验,从而保证驾驶过程的安全。
当自动驾驶系统最初上线时,毫末智行会根据主流用户习惯做出一个标定,未来则会标定出激进驾驶、平顺驾驶等多种不同的驾驶习惯,甚至直接在车端学习本车驾驶员的习惯,满足不同用户不同场景的需求。
在数据标注阶段,毫末采用了很多深度强化学习方法,构建起了闭环标注系统,运用了无监督自动标注算法,大大提升了数据标注的效率,以适应大规模量产的需求。
顾维灏介绍,毫末正在将数据标注作为一项正式产品打造,已经将闭环思路引入其中。
在量产上路之前,还需要大量的测试与验证工作。除了实际道路测试,还有在服务器上的仿真测试。
在演示视频中,毫末智行的测试车先完成一次实际道路测试,感知到的数据在服务器端能够渲染出同样的道路场景,研发人员可以在同样场景下定义不同的天气、光照、曝光、路面参与者,从而实现同一路段的多场景反复测试。

文章插图
MANA的自动验证
甚至可以说,自动驾驶仿真测试就是在“元宇宙”中进行的。而如果仅仅依靠实际道路测试,同一路段的重复性因素较多,随机性的因素相对较少。因此,依靠仿真测试能够大大缩短研发周期。
- 合规|上海制定反垄断、互联网营销算法、盲盒经营活动等新业态合规指引
- c语言|e观沧海丨算法焉能藏“算计”
- 算法|【2022/1/15】thinkphp源码无差别阅读(二十)
- 算法|电竞好用日常也爽的小金刚显示器,优派VX2780-2K-PRO分享
- 算法|用户来得太难,走得太容易,怎么办?
- 虽然百度官方对百度自动驾驶部门裁员矢口否认|自动驾驶技术公司毫末智行的生存之道
- 华人女博士提出高效NAS算法:AutoML一次「训练」适配亿万硬件
- 算法|数据结构学习笔记之线性表(02)
- 科技驱动创新,行业智行千里《2022联想智能化转型行业白皮书》重磅发布
- 王国彬|北京海淀:一审宣判全国首例涉人工刷量平台干扰搜索引擎算法不正当竞争纠纷案