|环卫、物流、乘用车组局 Robo-City,这家创企要做城市道路自动驾驶平台型技术( 三 )
如前所述,城市场景下,市政环卫、城市配送、Robo-Taxi都面临着类似的复杂环境,但由于Robo-Taxi的行驶半径更大,对算法和感知的容错度更低,因此也需要解决更多的长尾问题。
为了实现城市动态场景中自动驾驶技术的突破和完善,企业需要获得大量城市场景中的自动驾驶数据,利用数据进行自动驾驶算法、软件和平台的迭代升级,再通过规模化的车队验证算法。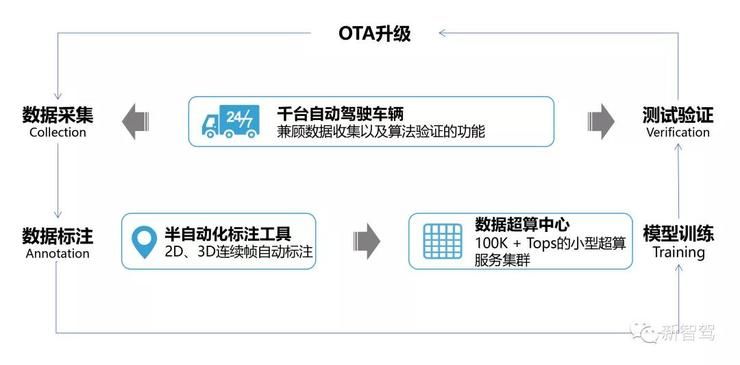
文章插图
数据获取、技术迭代、算法验证,三个环节需周而复始且缺一不可。
何弢表示,Robo-Taxi乘用车能最直接、最高效地反映出其自动驾驶软件、算法的各种长尾问题,是检验其自动驾驶技术在城市场景中是否可成熟应用的代表性平台。
在他看来,不先验证自动驾驶技术的成熟度,而首先去考虑技术的商业化落地和应用,是本末倒置,也是相当危险的方式,所以从成立之初,酷哇的研发平台就是基于Robo-Taxi的。
终局:平台型技术?为了不断提高其技术的复用率,酷哇也就更注重对自动驾驶解决方案底层能力的构建,希望打造出能够同时支撑环卫、城市配送及Robo-Taxi测试型营运的平台型技术。
文章插图
何弢认为,要想推动自动驾驶技术更广范的落地,既需要具备各自垂直场景的业务型技术,也需要具备各场景下都能普遍适用的通用型技术,即城市场景下的自动驾驶软硬件解决方案。
目前,在硬件方面,酷哇联合中联环境、盈峰环境、北汽、奇瑞等行业头部企业,已开发出3吨-18吨级别的新能源线控底盘和车规级自动驾驶控制器等;软件方面,酷哇则自研了AutoPilot无人驾驶系统、城市大管家云脑系统、厘米级高精定位技术等。
而此类平台型技术的核心,在于企业对自动驾驶数据的获取和加工,这决定着自动驾驶算法的可用度,也影响着自动驾驶车辆在城市场景中的落地。 
文章插图
每一台自动驾驶车辆都是数据的入口,这是酷哇的自动驾驶技术应用从环卫车、城市配送车扩大到乘用车的关键原因,也是目前各企业强调和不断积累车辆所测试里程数的原因。
但如今自动驾驶技术日新月异,比如感知方案中,无论是激光雷达、高清摄像头系统,还是多传感器融合系统,每年都在进行着革命性的迭代升级。
每次出现了新的感知硬件方案的迭代升级,数据源端也随之发生了变化,这意味着企业此前所收集到的相关自动驾驶数据的清零和失效。
“我们推动对平台型技术的研发,本质上是想打造超级数据工厂,希望每当感知方案发生重要革命性创新时,酷哇仍有很强的数据获取和加工能力。”何弢对新智驾表示,企业对数据的收集、清洗、标注越高效,对算法性能的迭代升级越高效,在行业中的竞争力就越强。
在这个层面,各自动驾驶企业还在技术储备阶段,真正的竞争还没有开始。
因此,相比于把资源投入到规模化车队的复制上,酷哇表示会更注重对数据超级工厂的建设。
酷哇在智慧环卫领域快速发展的原因,在于在自动驾驶行业中,它找到了自己的确定性。
如今酷哇又联合奇瑞,去打造L4-L5级别自动驾驶车辆,这实际上非常考验酷哇对行业需求、技术产品趋势和自身能力的准确预判。
何弢作为酷哇的创始人兼董事长,对自动驾驶和机器人领域研究十余年,但同时也对自动驾驶行业的商业模式和自身企业盈利模式有着自己思考。
不同于业内从道路封闭程度对自动驾驶落地场景的分类,酷哇根据对自动驾驶技术的要求和依赖程度,将场景之分成三类:
- OpenHarmony 项目群 12 月新增捐赠人美的集团、深圳开鸿
- 打脸!华为在美国,用专利把英特尔、苹果、微软、高通打败了
- iPhoneSE|都是情怀!iPhone SE3外观毫无改变:A15处理器、支持5G
- 400亿芯片交易接近尾声,英伟达、ARM表明态度,禁止收购后
- 合规|上海制定反垄断、互联网营销算法、盲盒经营活动等新业态合规指引
- 2022年买手机,128G、256G还是512G?外行人跟风买会出错
- 空调|格力、美的、海尔、海信、志高、奥克斯空调,其优缺点是什么?
- |OPPOK11x,精准的满足用户对于强续航,大存储、拍摄的需求
- 增资|撤离、暂缓!马云没有想到,蚂蚁融资生变,原因浮出水面
- 区委领导构筑静安数字经济竞争新优势|促发展、保安全| 区委