马斯克|不管马斯克怎么说,中国智能汽车激光雷达军备竞赛已经开始
贾浩楠 发自 凹非寺量子位 报道 | 公众号 QbitAI
蔚来1个、小鹏2个、威马3个…智能汽车“军备竞赛”正在上演。
今年一年间,几个国内头部造车新势力先后推出带激光雷达的量产车,数量一个比一个多。
文章插图
表面看好像行业内卷,硬件越堆越多,能力却是未知数。
但这其实是智能汽车、自动驾驶的两条路线之争。
得益于国内的基建、供应链优势,以激光雷达为标志的融合感知方案,第一次有了对垒特斯拉纯视觉路线的底气。
而数年如一日喷激光雷达的马斯克,在创业初期如果有国内新势力的条件,恐怕现在的特斯拉就是另一幅模样了。
视觉,还是激光雷达?2020年初,国产特斯拉Model 3上市,中国乘用车市场的竞争,迅速被拉到“智能”层面。
特斯拉的智能驾驶方案方案,视觉是绝对的主力,8个摄像头覆盖360°视野。
汽车对目标的感知、以及选择行驶策略的根据,主要依靠摄像头捕捉的图像数据,能力高低,全凭算法决定。
但从自动驾驶技术发展来看,早期大部分厂家的测试车辆,无一不背着一个“小花盆”:
文章插图
这就是Lidar,中文翻译过来就是激光雷达。
它代表了另一条技术路线:融合感知。
行驶决策的依据,不只依赖摄像头,而是综合考虑激光雷达的点云图、视频图像等等数据。
不同传感器之间的数据在算法层面进行融合互补。
算法对于图像,可能出现目标漏检误检,这时就能通过雷达回波的点云图“兜底”。
但是,这样多冗余的方案,却被马斯克嗤之以鼻。
马斯克认为,既然人类能仅凭两只眼睛开车,那么AI也一定能。所以特斯拉的追求,就是打造一个与人类别无二致的“AI司机”。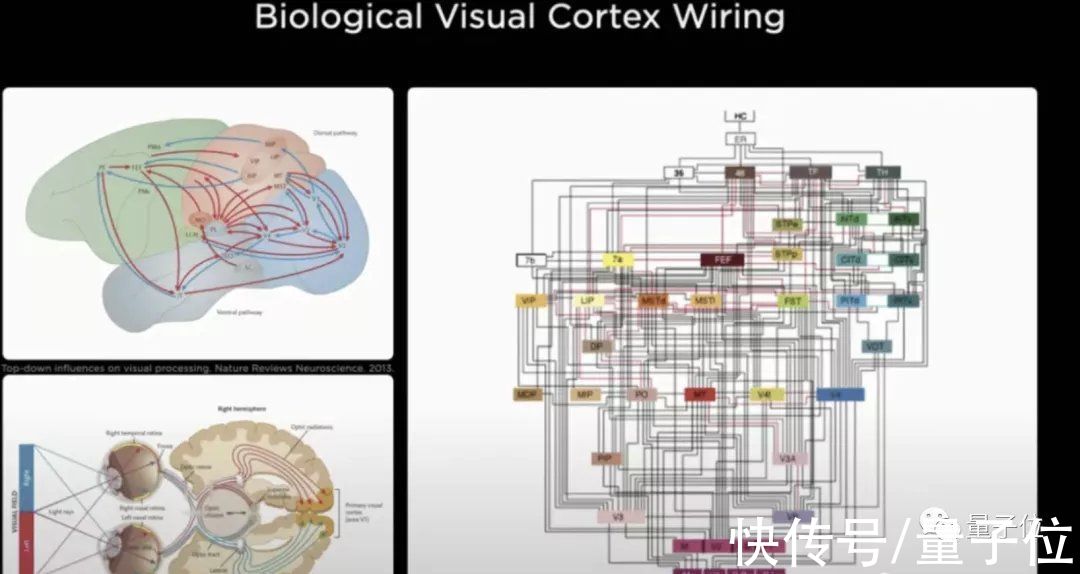
文章插图
采取多传感器方案的,都是算法能力不足的体现,“血统”不纯。
为此,特斯拉的算法、开发平台都围绕图像数据建立,甚至不惜自研芯片、自建超算来打磨算法。
客观的说,视频图像在数据层面,的确已经包括了驾驶所需的一切信息,但在算法层面,能不能准确感知识别,却是一个大问题。
去年6月,国内一辆Model 3在开启Autopilot情况下,车辆完全没识别出路上已经出事故侧翻的白色货车,一头怼了上去:
文章插图
这次所幸无人伤亡,但类似Autopilot这样以视觉为主的智能驾驶方案导致严重后果的的,也不在少数。
摄像头肯定看到了,但是算法却没能识别。
视觉方案的缺陷也在于此:恶劣天气、复杂路况,道路上非常规的异形物对系统影响太大。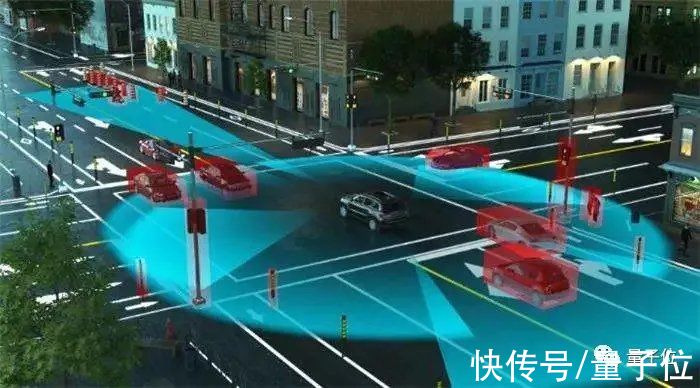
文章插图
且以超大数据“暴力”迭代算法,永远不能覆盖现实场景中所有异型车、障碍,在中国复杂路情况下尤其如此。
系统失效的风险永远存在。
所以,要在中国落地真正让用户敢用、愿意用的智能驾驶产品,感知识别是必须补的科目。
军备竞赛,为什么从激光雷达开始对于自动驾驶来说,激光雷达是个老朋友了。
Waymo、百度,以及后来一众创业公司,都在用。
激光雷达能做什么?
其实就是像周围环境发射激光束,然后从回波信号来计算目标信息,比如距离、方位、高度、速度、姿态、甚至形状等参数。
激光束遇到目标一定会产生回波,信号也一定能被系统接收,这就与图像目标可能的漏检错检形成本质差别。
- 苹果|库克压力确实大,在众多国产厂家对标下,iPhone13迎来“真香价”!
- 普莉希拉|祖籍徐州的普莉希拉,嫁全球第5富豪扎克伯格,坐拥6530亿被说丑
- 攻克|打破日本垄断!售价7亿元的设备被中企攻克,已开始量产
- 车祸事故|坦克300刹车不及撞飞马匹 实测车头够硬
- 飞利浦·斯塔克|最便宜的小米 12 来了,2000 块左右
- 迈克尔·杰克逊 45 度前倾是怎么做到的?
- 元宇宙持续发酵,或迎“终极形态”?马斯克为何力挺脑机接口技术
- 空调|格力、美的、海尔、海信、志高、奥克斯空调,其优缺点是什么?
- 试剂盒|中国研发团队推出“更灵敏”试剂盒获批上市 可精准探测德尔塔、奥密克戎
- excel|苹果换设计师了?iPhone14“定妆照”曝光,库克的审美终于提高了