螺旋桨|能玩滑板、走钢丝的机器人,到底有多酷?( 二 )
想要飞起来,首先要控制机器人的整体重量。为了使其足够轻量化,LEO 的腿部结构采用碳纤维管和 3D 打印碳纤维增强尼龙关节来支撑滚珠轴承。
其次,为了减少在飞行过程中惯性对机器人运动的影响,LEO 腿部的几何设计有两个封闭的运动回路,这种平行结构允许腿执行结构放置接近躯干,形成一个更为紧凑的结构,从而减少惯性。
在运动驱动方面,LEO 的每条腿上装有 3 个伺服电机,一个位于骨盆处,另外两个位于髋部的前后;在控制方面,LEO 有两个并行运动控制器,分别用于行走和飞行。
文章插图
LEO 正在绳索上行走
行走时,机器人的腿部承担大部分重量,这时螺旋桨仅起到稳定运动的作用。 飞行时,得益于肩部放置的四个对称式的螺旋桨,LEO 拥有较好的平衡性,可以完成一些常规机器人难以完成的动作,比如在绳索上行走,滑滑板等等。
与此同时,在螺旋桨的帮助下,即便在达 3.8 m/s 的风速下机器人也能保持稳定,抗干扰性极强。
而两种运动模式切换的关键,隐藏在机器人的脚部。
LEO 的脚部有一开关,它决定了 LEO 什么时候可以在地面上正常行走,什么时候需要切换为其他的运动模式。此外,LEO 每条腿的末端都有一个半球形的聚氨酯橡胶,该部位的摩擦系数较高,主要用来防止机器人在站立和行走时打滑。
两种运动模式的切换,可以通过其机载计算机和传感器套件完全自主运行。
03
双模态运动机器人的未来
既能飞也能跑的双模态运动机器人,无疑拓宽了更广阔的应用场景。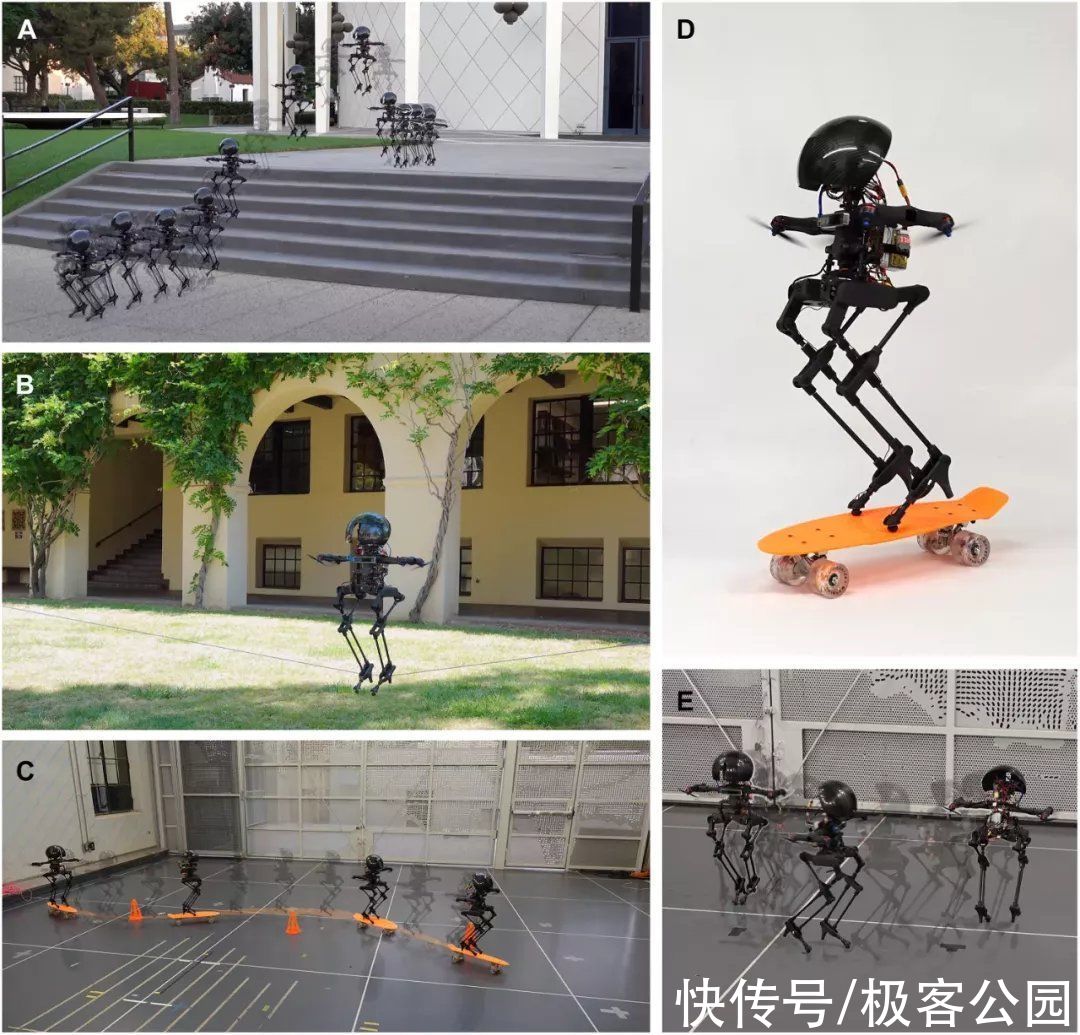
文章插图
LEO 拓宽了更多应用场景| Science Robotics
「涉及高空作业的危险环境,也许是最适合 LEO 的应用场景。」研究人员在论文中提及。
凭借着出色的平衡能力,LEO 可以飞行降落到某些高空环境中,并通过可以自由运动的双足近距离的接触环境表面,从而完成许多其他类型机器人无法完成的任务。比如——高压线路检测工作,LEO 可以降落到电线上并沿着电线行走,进行检修工作,降低维护成本的同时,也减少了人类在从事这类工作时可能遇到的危险。
此外,该研究团队认为 LEO 所具备的技术可以促进自适应起落架系统的发展,他们设想未来的火星旋翼机可以配备腿式起落架,以便使它们降落在倾斜或不平坦的地形上时可以保持身体平衡,从而降低在着陆失败的风险。
【 螺旋桨|能玩滑板、走钢丝的机器人,到底有多酷?】虽然四个螺旋翼的设计让 LEO 在即便遇到外力猛推的情况下也不会摔倒,但这一切是以极高的能耗为代价实现的。能耗越高则意味着 LEO 的能量效率越低,不利于其长时间执行任务。
为此,研究人员计划改进腿部的设计、提高 LEO 性能,使 LEO 能够在最少的螺旋桨帮助下行走和保持平衡。
目前该机器人尚不出售,为了使 LEO 在未来能够更充分地发挥其混合运动模式的优势,研究人员计划在未来开发一套新的控制算法,利用深度神经网络控制其着陆,以便让机器人更好地了解落地环境,自主选择采取哪种运动模式。
*图片来源:视觉中国
本文为极客公园原创文章,转载请联系极客君微信 geekparker
- 滑板车|海外市场,撑起九号公司500亿市值
- 华为智慧屏和PC主机都能玩转,三模达尔优键盘用着写意
- 苹果|绿厂适配有点东西!无损音乐首选Apple Music,用Find N也能玩
- 美团|小学生哭了,腾讯元旦防沉迷措施上线,未成年仅能玩游戏四小时
- 屏幕也能玩新花样?realme给出答案,网友:直屏天花板
- 太鼓达人|不仅能玩宝可梦,还能玩太鼓达人,用Find N玩掌机游戏是何种体验
- vivo|有颜有料!全能玩家vivo S12系列今晚正式发布
- AMD|1080P不够看,搞一台能玩4K游戏的电脑主机
- 幻塔零氪能玩吗?幻塔零氪玩法建议
- Windows|来一套白色主机, I7 11700K加上RX6800XT到底能玩什么