文章图片
工业机器人主要有以下四种系统 , 分别介绍它们从中的作用是什么!
1.机械结构系统:
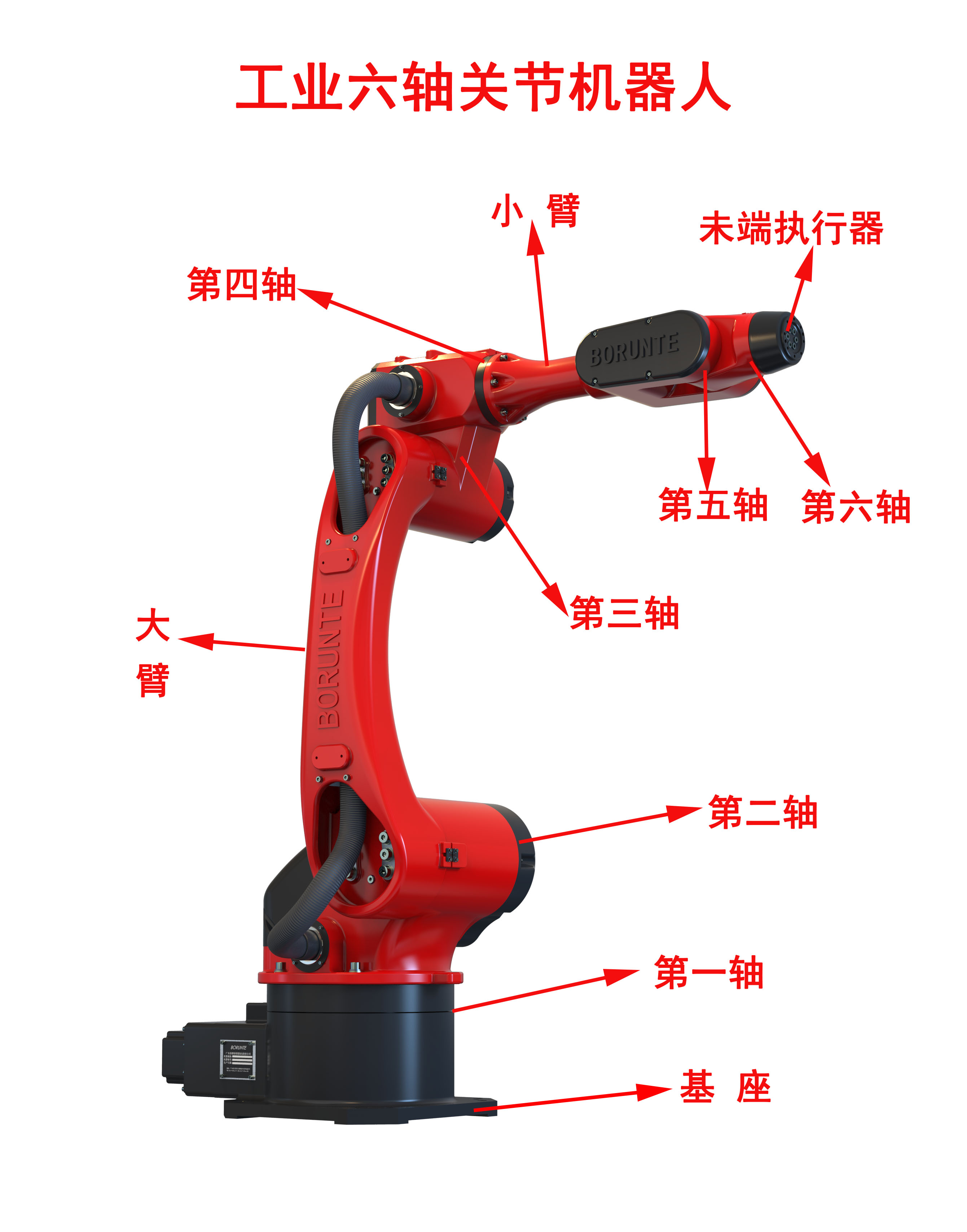
机械结构系统又称操作机或执行机构系统 , 是机器人的主要承载体 , 它由一系列连杆、关节等组成 。 机械系统通常包括机身、基座、手臂、手腕、关节和未端执行器 , 每一部分都具有多自由度 , 构成一个多自由度的机械系统 , 如下图所示 。
①机身部分—如同机床的床身结构一样 , 机器人的机身构成机器人的基础支撑 。 有的机身底部安装有机器人行走机构 , 便构成行走机器人:有的机身可以绕轴线回转 , 构成机器人的腰;若机身不具备行走及回转机构 , 则构成单机器人臂 。
【工业机器人|工业机器人主要有那些系统?它们分别的作用是什么?】②基座—它是机器人的基础部分 , 起支撑作用 。 整个执行机构和驱动装置都安装在基座上 。 对固定式机器人直接连接在地面基础上 , 对移动式机器人 , 则安装在移动机构上 , 可分为有轨和无轨两种 。
③关节—它通常分为滑动关节和转动关节 , 以实现机身、手臂各部分、未端执行器之间的相对运动 。
④手臂—它是连接机身和手腕的部分 。 一般由上臂、下臂和手腕组成 , 用于完成各种简单或复杂的动作 , 它由操作器的动力关节和连接杆件等构成 。 它是执行结构中的主要运动部件 , 也称主轴 。 主要用于改变手腕和未端执行器的空间位置 , 满足机器人的作业空间 , 并将各种载荷传递到基座 。
⑤手腕—它是连接机身和手腕的部分 , 将作业载荷传递到臂部 , 主要用于改变未端执行器的空间位置 。
⑥未端执行器—它是直接装在手腕上的一个重要部件 , 通常是模拟人的手掌和手指的 , 可以是两手指或多手指的手爪未端操作器 , 有时也可以是各种作业工具 , 如焊枪、喷漆枪等 。
2.驱动系统(驱动装置)
驱动系统是驱使工业机器人机械臂运动的机构 。 按照控制系统发出的指令信号 , 借助动力元件使机器人运行起来 , 给各个关节即每个运动自由度安装传动装置 , 这就是驱动系统 。 其作用是提供机器人各部位、各关节动作的原动力 。
根据驱动源的不同 , 驱动系统可分为电动、液压、气动三种也包括把它们结合起来应用的综合系统 。 驱动系统可以与机械系统直接相连 , 也可通过同步带、链条、齿轮、谐波转动装置等与机械系统间接相连 。 运动精度不高、重负载或有防爆要求的机器人采用液压、气压驱动 , 工业机器人大多采用电气驱动 , 而其中属交流伺服驱动应用最广 , 且驱动器布置大都采用一个关节一个驱动器 , 它们的特点对比如下图所示 。
3. 感受系统
感受系统通常由内部传感器模块和外部传感器组成 , 其作用是获取内部和外部环境中有意义的信息 , 并把这写信息反馈给控制系统 。 内部传感器用于检测各关节的位置、速度等变量 , 为闭环控制系统提供信息 。 外部传感器用于检测机器人与周围环境的一些状态变量 , 如距离、接近成都和接触情况等 , 用于引导机器人 , 便于识别物体并做出相应处理 。
智能传感器的使用提高了机器人的机动性 , 适应性和智能化的水准 。 人类的感受系统对外部世界信息的感知是极其灵巧的 , 然而对于一些特殊的信息 , 传感器比人类的感受系统更有效率 。 工业机器人往往与外部设备集成为一个功能单元 , 如加工制造单元、焊接单元、装配单元等;也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元 。
- 本文转自:光明网救生机器人到岸后|风浪中男孩被机器人救回
- 机器人|米首款“全尺寸人形仿生机器人”,正式登场
- 本文转自:哈尔滨新闻网8月10日|中国机器人及人工智能大赛落幕|哈师大学生获仿人型机器人单人舞比赛一等奖
- ai|小米高端化战略倍道而进:全面构建“小米科技生态”,新一代折叠屏、自动驾驶技术、人形仿生机器人等重磅发布
- 机器人|机器人万亿蓝海市场来临 多家上市公司抢滩布局
- 机器人|?旺旺董事痛斥郭台铭:没内地的人力资源,富士康哪来一百万工人
- 小米科技|“三大战线”齐烧钱!小米也搞仿生机器人,为何资本市场却不看好
- 本文转自:太原新闻网本报讯(记者 郜蓉)8月12日省科协消息|世界机器人大赛太原城市选拔赛落幕 1200余名选手激烈角逐
- 小米科技|美国盯上中国存储芯片,长江存储被点名,想限制中国整个工业?
- 机器|拥有大屏幕4k分辨率,这台国产笔记本电脑,除了好看还很实用