iPhone|华为激光雷达新专利曝光:一颗雷达,两种功效

文章图片
文章图片
关于自动驾驶汽车传感器的技术路线 , 曾经有视觉感知和融合感知两种路线之争 。
特斯拉是视觉感知的坚定支持者 , 马斯克曾公开表示 , “激光雷达很愚蠢 , 任何使用激光雷达的(公司)都会完蛋” 。 此派的支持者认为 , 既然人类仅靠双眼就可以感知外界 , 完成驾驶 , 那么自动驾驶也能够应用纯视觉感知方案 。
不过 , 说归说 , 如果激光雷达的成本与性能足够成熟 , 特斯拉或许也难逃“真香定理” 。
现阶段的激光雷达的确还面临诸多问题 , 其中之一在于难以保证同时具有近距探测功能和远距探测功能 。
远距探测的激光雷达模块为了能够探测更远距离 , 同时具有较高解析度 , 在功率有限的情况下 , 通常只能维持较小的视场范围 , 以便能够探测到目标大小、行进方向及速度 。
近距探测模块的激光雷达通常用于检测突然出现的目标 , 要求激光雷达能够在短时间内进行大角度探测 。 而无论远距探测模块还是近距探测模块均无法同时具有高解析度和大角度的性能 。 为了同时实现近距探测和远距探测 , 只能在车辆上安装两个激光雷达 。 无论是从成本 , 还是从车体空间来看 , 这都是一个问题 。
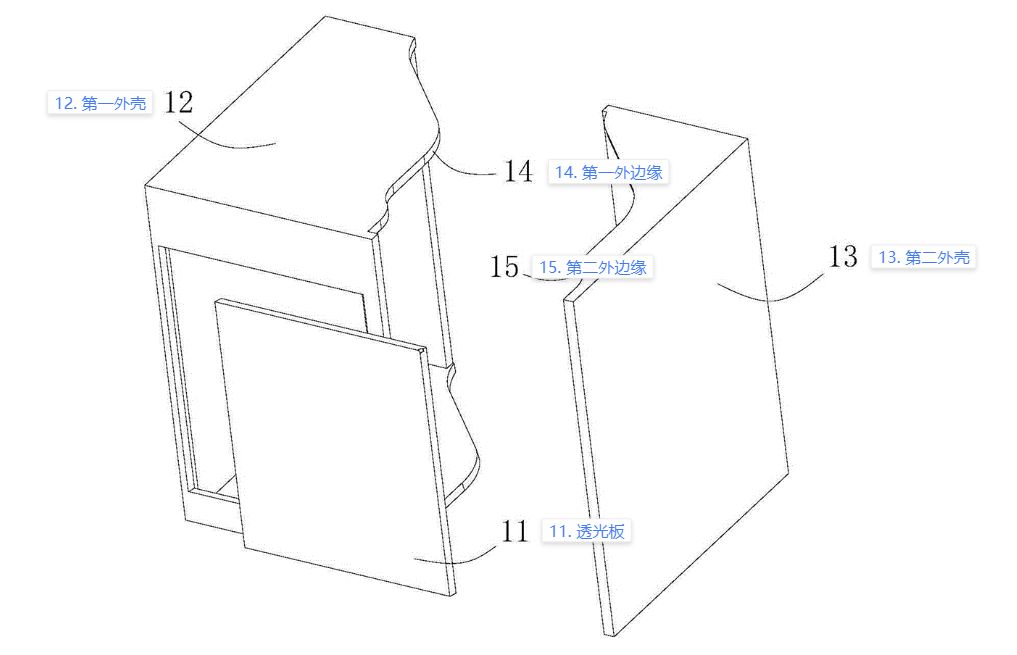
华为在7月12日公开了一件实用新型专利 , 提供了一种激光雷达及车辆 , 该激光雷达在结构上进行了创新 , 能够融合两种雷达的特点 , 同时具有近距探测功能和远距探测功能 , 同时减小了激光雷达的体积 。
专利中描述的激光雷达包括近距组件2和远距组件3 , 如上图所示 。
其中远距组件3的解析度较高 , 其发射模块31发射光束的波长约为1550nm , 与蔚来ET7上搭载的超远距离高精度激光雷达相同 , 适用于探测150米~300米的较远距离 , 能够感知到激光雷达前方较小视场范围内的目标大小、行进方向及速度 。 视场角FOV在30°~35°之间 。
近距组件2的发射光束波长约为905nm , 适用于探测前方150米以内的距离 , 能够在短时间内进行大角度探测 , 获取到较大视场范围内突然出现的目标 。 视场角FOV在140°~180°之间 。
为了使近距组件和远距组件反射的激光不会被相互阻挡 , 近距发射模块的第一光轴和远距发射模块的第二光轴之间的夹角α在10°~40°之间 , 近距接收模块的视场角FOV1与远距接收模块的视场角FOV2之比 , 满足FOV2/FOV1≤1/5 , 实现了激光雷达小型化 。
此外 , 近距组件2和远距组件3安装于外壳1能够使近距组件2和远距组件3相对外壳1的位置固定 , 从而保证激光雷达工作时的稳定性 。
专利中描述 , 激光雷达可以安装在车顶、前挡风玻璃和、前保护杠 。
此前华为极狐Hi中 , 采用了3颗前向激光雷达来达到超过270°的前方视野 , 成本必然不菲 。 难怪极狐的阿尔法S高配版超过40万的定价了 。
而此前蔚来ET7的Aquila超感系统 , 更是配备了33个高性能传感器 。 包括1个高精度激光雷达 , 7个800万像素高清摄像头、4个300万像素高感光环视专用摄像头、1个增强主驾感知系统、5个毫米波雷达、12个超声波传感器、2个高精度定位单元和V2X车路协同系统 。
有了这种视场角FOV可达140°~180° , 既能看近 , 又能看远的“二合一”的激光雷达 , 车企们在硬件数量上可能能够减少硬件 , 降低成本 。
- |工程师眼中的地平线:成为“华为”,才有出路
- 华为把高端手机让给了苹果;华为Mate 50硬刚iPhone 14系列
- 小米科技|小米“抄袭”华为?这个功能真的一模一样
- javascript|易烊千玺代言!华为Nova10和Nova10Pro相比,哪一款更值得入手?
- 英特尔|英国电信4万多员工停工两天 不用华为5G日子也好过不了
- 京东|中国第一大民企诞生:营收9515亿元,超过了华为、阿里、腾讯等互联网巨头
- 京东|国内第一大民企诞生:营收将近万亿,超过了华为、阿里、腾讯
- 麒麟980|麒麟980+4800万AI四摄+鸿蒙系统,跌至769元,二手华为更亲民
- iPhone14|诺基亚Nokia新推出三款复刻功能机,还自带耳机
- iPhone14|iPhone 14又双叒被曝光了?华强北这次赢麻了