其一,当车辆识别到目标后为了避撞,则会以平均减速度为2.77m/s2左右做急刹车,容易造成车内驾驶员或乘客较大不舒适性;
其二,当车辆无法及时识别到静止目标,或者识别到该静止目标的时间过晚时,则会造成与前方环境目标的碰撞;
基于此,加入车路协同能力建设就显得尤为关键了。我们的目地视预判前方危险目标,可以很大程度的提升识别距离为及时有效的制动提供保障。当然,当前这代产品的自动驾驶还无法真正意义上的实现车路或车车信息通信。
后面一种由于晚上光线不足导致无法准确的目标探测问题,则有两种解决方案,当前采用的是自车激活自动大灯的方式进行缓解,实话讲这只能解决较近距离下的车道信息探测,通常情况下,这种距离的探测不会超过150m,这种大灯状态对于车道信息的探测能力也只是杯水车薪。为了根治这类型的问题,可能只能采用搭载夜视系统的方式进行性能提升了。
车辆数据采集训练系统
部分主机厂、供应商为了应对当前自动驾驶系统在环境认知和数据训练中的不足,往往倾向于采用装备更多的采集设备,开发有效的环境采集分析算法来获得场景训练库中的数据模型。目前绝大多数研发机构在测试自动驾驶系统的过程中,一方面,发现自动驾驶算法无法覆盖当前工况,测试人员靠手工记录问题;另一方面,随着自动驾驶数据采集方案的部署,以Tesla为例开始分析真实用户在驾驶过程中的特征数据来改善和升级当前的自动驾驶算法。
影子模式运行原理
自动驾驶系统的开发、测试数据集的建立需要依赖众多数据源和数据域,从而确保自动驾驶可以达到必要的安全水平。同时,通过映射到模拟驾驶员驾驶风格的仿真系统,可以实现自动驾驶系统的仿生优化。

文章插图
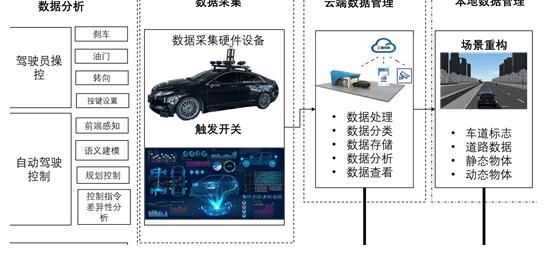
影子模式的整个系统架构表示如下,包含搜集大数据、车端数据模拟分析、触发记录、云端管理、仿真重构和算法快速测试。其中涉及大量的场景分析建立特征级数据语义表达;采集驾驶员操控信号进行驾驶员行为合理性分析;采集车身反馈的行驶数据实现控制指令差异性分析;基于该行为差异性数据-机理分析来实现学习型网络的分类触发和控制;最终以一定的模拟训练算法来定位是环境感知问题和决策规划问题。
文章插图
那么真正的影子模式真的能够解决大部分数据搜集、标注及算法的训练问题么?笔者认为还是存在一定的不确定性。
影子模式的短板
“影子模式”的核心在于,在有人驾驶状态下,系统包括传感器仍然运行但并不参与车辆控制,只是对决策算法进行验证。且过程要求影子模式可以提供更多更大范围的极端工况,包含标注的和非标注的训练数据。而影子模式都是依赖人类司机的驾驶决策来标注和触发数据回传的。因此,影子模式算法跑起来的整个过程仍旧是需要确保自动驾驶芯片具备较高的算力能力的。同时,触发机制是以驾驶员操控为合理性的标准来触发系统的记录行为的,而这种判断标准并非一定是正确的,比如该减速的场景,驾驶员确大踩油门或大打转向等。另外,对于影子模式的评价机制并不科学,因为自动驾驶的算法是否精准是需要定位到具体的感知、规划、决策、控制这四个子模块中,而最终表现形式往往只有一种。这就使得在后续数据分析中并无法准确定位出具体是哪一个子模块出了问题。且影子模式采集车辆不一定都是自动驾驶车辆,有可能是辅助驾驶车辆,面向是L2级,这类辅助驾驶车辆能否用于L3级是不确定的。因为数据采集的传感器,规控模块所触发的记录端算法都不一致。
- OPPO Find|从4499元跌至3199元,65W闪充+后置四摄,2K曲面屏旗舰加速让路
- 阿尔法|北汽蓝谷:极狐αT、S未具备通过改造达到较高水平自动驾驶的条件
- p显卡即将出货,老将从AMD归来,英特尔GPU取经路能否“通关”?
- 收购|拟斥资数十亿欧元,传大众欲收购华为自动驾驶业务?
- 荣耀|从2699降至1769,1亿像素+66W+256GB,中端机沦为千元机
- 特斯拉公司|特斯拉自动驾驶遭德国调查
- AMD|出走8年老将从AMD回归!Intel GPU取经路能否“通关”
- 可支配收入|从线上家具数据平台"合和舍" 看进口家具市场的未来可能
- 冬奥会|你从哪个“墩”迷上?回顾冰墩墩爆红名场面合集 :“义墩墩”含泪告别冰墩墩
- 华为|突发!德国大众洽谈收购华为自动驾驶部门,交易价将超百亿元|明镜pro