文章插图
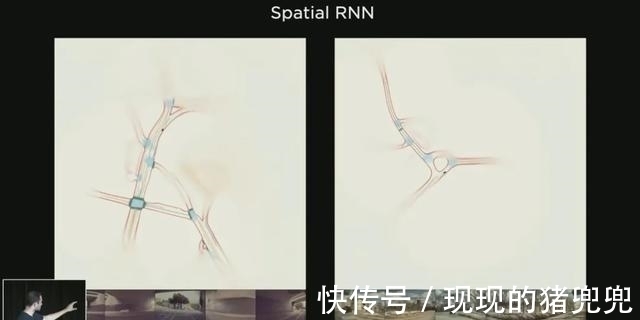
Karpathy 指出,特斯拉现在的 FSD 战略是更具凝聚力的。事实证明,特斯拉的车辆可以有效地绘制实时地图。与 Super Cruise 和 Waymo 等汽车及软件领域的竞争对手的预绘制地图策略相比,这是一个巨大的差异。
自动驾驶软件总监 Ashok Elluswamy 介绍了混合规划系统,以 Autopilot 如何变道为例,当与其他汽车并排行驶时,Autopilot 不仅要考虑它们的驾驶方式,还必须考虑其他汽车的运行方式。
在狭窄的过道周围进行规划时,重要的是要考虑其他驾驶员及其行为,例如在必要时让行:

文章插图
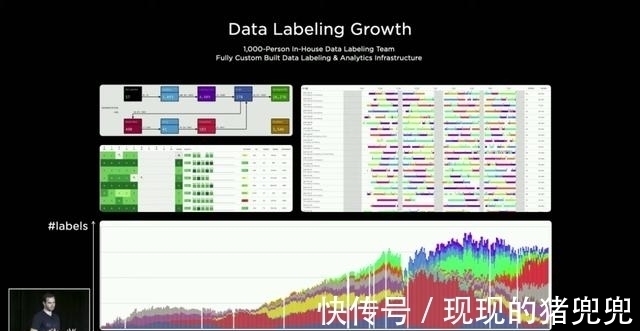
Karpathy 还提到了数据标注问题。他指出,外包给第三方公司的手动标签并不是最佳选择,本着垂直整合的精神,特斯拉选择建立自己的标注团队。
一开始,特斯拉使用的是 2D 图像标签。最终,特斯拉转向了 4D 标签,可以在向量空间中进行标注。但是这还不够,自动标注技术得到了发展。
文章插图
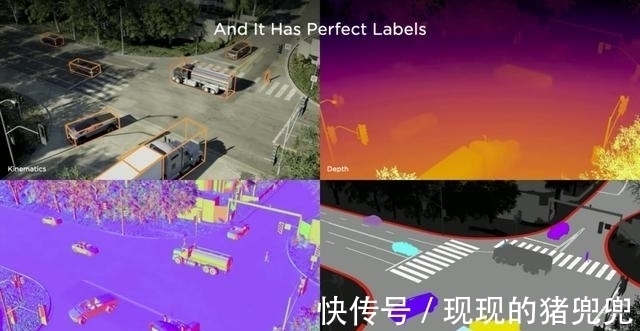
有太多的标签需要完成标注,而让人们手动来完成是不可能的。特斯拉自动驾驶软件负责人 Ashok Elluswamy 展示了道路和道路上的其他物品是如何从一辆正在行驶的汽车中「重建」出来的。这有效地让特斯拉能够更快地标记数据,同时允许车辆即使在存在遮挡的情况下也能安全准确地导航。
甚至在对比度过高,摄像头采集的图像不够清晰时,特斯拉还使用神经网络对画面进行了增强。

文章插图
Ashok 指出,这些策略最终帮助特斯拉将雷达从 FSD 和 Autopilot 套件中淘汰,并采用了纯视觉模型。雷达 + 摄像头系统与纯视觉之间的比较显示了该公司当前的战略有多精细。同时他也谈到了仿真如何帮助特斯拉开发其自动驾驶系统。尽管特斯拉专注于现实世界的数据,但它也使用仿真。
特斯拉利用一个新的仿真程序 (用他们自己的话说,就是 Autopilot 扮演玩家的视频游戏) 来测试边缘情况和其他可能遇到的问题。
文章插图
神秘超算 Dojo:革命性架构
DOJO,这次特斯拉 AI 日的最大看点,最终也没有让人失望。
2020 年 8 月,马斯克表示,该公司正在研发一款名为「Dojo」的神经网络训练超级计算机,将主要处理从特斯拉汽车在路上获得的海量视频数据。马斯克发推称:「Dojo V1.0 还未完成,估计还需要一年的时间。不仅仅是芯片本身的研发难度,能效和冷却问题也非常的难。」
几个月后,马斯克又补充道:「Dojo 采用我们自研的芯片和为神经网络训练优化的计算架构,而非 GPU 集群。尽管可能是不准确的,但是我认为 Dojo 将会是世界上最棒的超算。」
今天,特斯拉终于揭开了 Dojo 计算机芯片的神秘面纱。它采用了创新的架构,将算力分布在复杂的网络构造中,实现了极高的算力、高带宽、低延迟的网络吞吐量。

文章插图
Dojo 的设计是从芯片开始从头做起的。Dojo 的训练 CPU 属于 ASIC 芯片,专注于人工智能训练,采用 7 纳米制程,可以实现 1024GFLOPS 的 BF16 算力,在芯片周围的四向都有 4TB/s 的传输带宽。
- 东南亚|MIUI13深度使用报告,这还是我认识的MIUI吗?网友评价很真实
- 华为|华为任正非最新信件曝光:春天很快就会到来!
- 都匀一中|任正非新春致母校信曝光:现在虽是冬天,但春天很快就会到来
- 观光巴士|无人驾驶观光巴士走进湖滨
- 资讯丨智能DHT+高阶智能驾驶辅助,魏牌开启“0焦虑智能电动”新赛道
- 发现最小白矮星,其大小相当于月亮,这让科学家很兴奋
- Google|全球游戏领域的标杆,MSI&AMD把事情做得很漂亮
- 算力|不靠显卡!NVIDIA在中国焕发第二春:自动驾驶芯片被车厂爆买
- 自动驾驶|华为首秀自动驾驶,王兴:特斯拉遇到技术与忽悠能力相当的对手了
- |盘点三款外观颜值最适合春节的手机:一款比一款好看,性价比很高