沈阳自动化所研发磁驱动连续体微型机器人助力微创手术
近日,沈阳自动化所微纳米自动化课题组科研团队面向人体狭窄腔道内患病组织的精准治疗,结合微纳米技术,研发了一种磁控连续体微型机器人。机器人及人工智能领域知名期刊《先进智能系统》(Advanced Intelligent Systems)(2021年第3卷第10期)以封面文章形式刊登了这项成果。

文章插图
Advanced Intelligent Systems封面刊载
传统的手术软镜导管由于机械拉线驱动方式的限制,很难在进一步缩小整体尺寸的同时保证其可控性,因此限制了机器人在人体内的应用范围。微创手术中用到的手术导管机器人可以帮助医生对病人狭小腔道内的组织结构进行精确微创干预治疗。微型化和智能化是手术导管机器人发展的趋势和面临的挑战。
文章插图
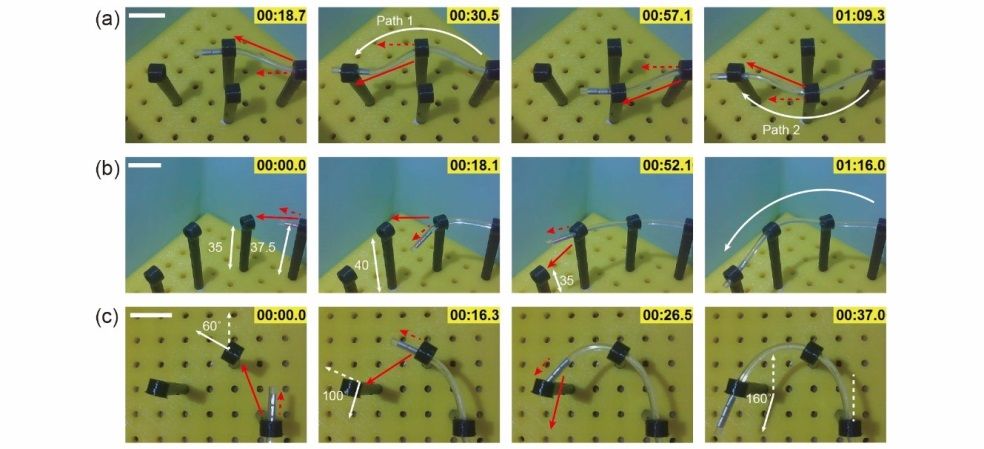
连续体机器人灵巧通过各种狭窄通道
该连续体机器人采用聚二甲基硅氧烷(PDMS)材料制备,在外磁场驱动控制下可以实现在管道内的灵活弯转和穿行等动作。较此前采用机械拉线的驱动模式,这款外磁场驱动的连续体机器人具有更加简单的结构和灵活的运动性能,同时机器人的直径进一步缩小到了仅有2毫米甚至可达到0.4毫米,达到此前最小机器人直径的七分之一,使其可面向人体更狭小腔道内组织结构进行灵活可控的微创治疗,比如应用于脑神经外科、眼内手术或血管内手术等。
面向人民生命健康,该研究团队长期致力于微纳米机器人方面的研究,从毫米级、微米级到纳米级机器人开展了一系列研究,并与医疗手术应用紧密结合,针对临床应用中遇到的困难开展原始技术攻关。磁控连续体微型机器人的研发工作为面向临床应用奠定了基础,将有望显著提升微创手术的智能化程度。
【沈阳自动化所研发磁驱动连续体微型机器人助力微创手术】(中国日报辽宁采访人员站)
- 试剂盒|中国研发团队推出“更灵敏”试剂盒获批上市 可精准探测德尔塔、奥密克戎
- 联想|司马南没告诉你们,当年联想的使命根本不是研发,而是赚钱养计算所
- 单片机|OPPO最新实验室曝光:与华中科技大学联合打造,将加速新技术研发
- 小米投资 UWB 芯片研发商优智联,浩云科技已参股
- 华为|华为落户济南搞研发,在青岛搞商务
- 芯片|高通再见,iPhone将全部采用自研发芯片:2023年首次实现
- 核心技术|国内科技巨头宣布,投资1000亿搞研发,海外网友:东方雄狮已
- 消研所周报|红杉中国控股WE11DONE;奈雪自主研发自动化制茶设备;bosie正式发布NFT数字艺术作品 | 自动化
- 进步奖|招标股份董秘回复:公司研发的生态环境数字孪生平台在下游应用领域更多基于客户自身需求
- 英伟达|再拿一地!全球自主研发专利申请数量全球No.1,华为凭什么?