文章图片

文章图片

文章图片
长三角G60激光联盟导读
据悉 , 本文回顾了过去30年中提出或构建的典型基于机器视觉的除草机器人 , 以及一些用于杂草检测的开放数据集 。 本文为第一部分 。
摘要
由于除草机器人在节省劳动力和农药方面的明显优势 , 它是现代和可持续农业的关键技术之一 , 越来越受到研究人员和开发人员的关注 。 近年来已经发表了一些关于基于机器视觉的除草机器人的论文 , 但是没有明确尝试系统地研究这些论文来讨论机器人除草控制系统的组件 , 例如视觉导航、杂草检测和定向除草 。 本文回顾了过去30年中提出或构建的典型基于机器视觉的除草机器人 , 以及一些用于杂草检测的开放数据集 。 讨论了基于机器学习(ML)或深度学习(DL)的除草机器人的图像预处理、图像分割、导航线提取和杂草识别等关键技术 。 为了说明DL算法在杂草检测中的应用 , 本文提供了杂草对象检测结果 , 并使用公共数据集对八种基于DL的基线方法进行了比较分析 。 研究发现 , 机器人除草控制系统的每个部分仍有许多问题需要解决 。 由于环境变化和系统复杂性 , 基于机器视觉的除草机器人仍处于早期阶段 。 系统综述的结果提供了在除草系统中使用机器视觉的创新趋势的理解 , 并为未来除草机器人的研究提供了参考 。
1 , 介绍
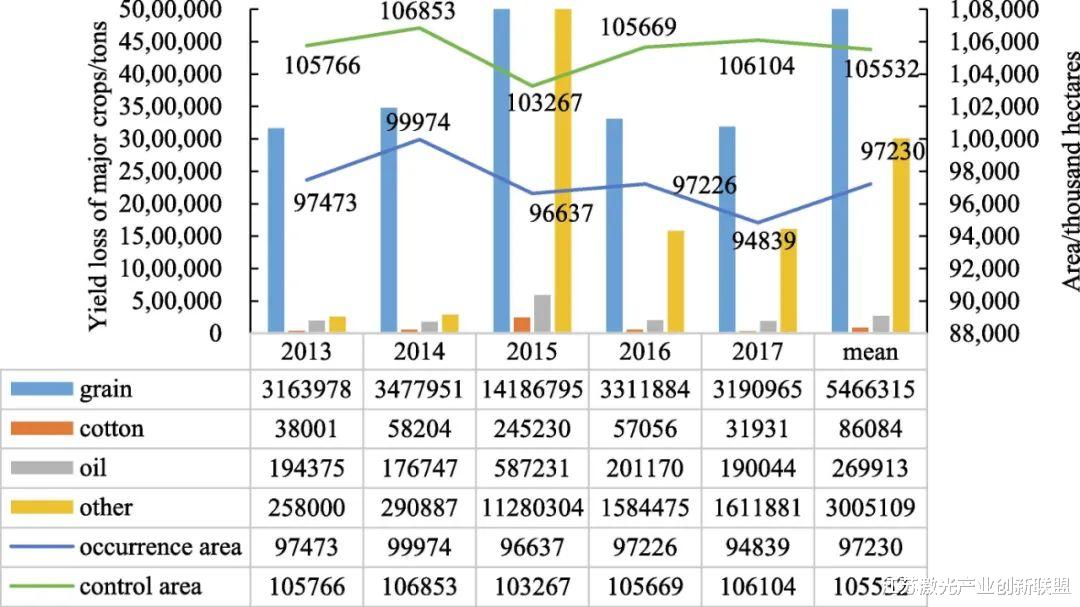
长期以来 , 杂草严重影响了农业生产 。 杂草与作物在田间争夺阳光、水分和养分 , 导致作物产量和质量下降 , 给农业经济造成巨大损失 。 根据公开数据(中国农业部 , 2019年) , 2013年至2017年 , 由于杂草 , 中国粮食、棉花、石油和其他作物的平均年产量分别减少了5466315吨、86084吨、269913吨和3005109吨 。 如图1所示 , 杂草防治面积为10553.2万公顷 , 杂草受损面积达到9723万公顷 。 这激发了农业生产和经济发展对杂草防治的巨大需求 。 在农业技术发展过程中 , 探索了许多有效的杂草控制措施 , 如农业控制、植物检疫、锄头除草、生物除草和化学除草 。 然而 , 传统的除草方法是劳动密集型和昂贵的;农业化学品的过度使用也造成了严重的环境污染和公共卫生问题 。 随着农业机械化和信息技术的进步 , 能够提高除草效率、节约资源、减少环境污染、提高农产品产量和质量的自动除草机器人可以逐步补充甚至取代传统的除草方法 。
图1 2013-2017年中国农田杂草危害情况 。
田间除草机器人是集环境感知、路径规划、目标识别和动作控制于一体的智能系统 。 近年来 , 机器视觉技术发展迅速 , 取得了显著的进步 。 最新的机器视觉技术已经应用于农业机器人 , 这鼓励了除草机器人的进一步发展 。 此外 , 随着性能的提高、硬件成本的降低以及识别和控制算法的准确性的提高 , 构建实用的自动除草机器人成为可能 。 除草机器人面临各种情况 , 这增加了除草操作的复杂性 。 在这个阶段 , 除草机器人很难在每个除草场景中实现其完整功能 。 尽管视觉控制除草机器人在国内外得到了广泛而深入的研究 , 并提出了许多机器人原型和除草检测算法 , 但该领域的最新研究成果缺乏系统的分析和总结 。
本文对除草机器人的研究现状进行了全面的文献综述 , 为除草机器人相关研究提供参考 。 通过在各大平台基于关键词如“除草机器人” , “视觉导航” , “杂草检测” , “精准农业” , “深度学习”(DL)和“机器学习”(ML)来搜索和选择相关文献 。 在对这些工作进行详细分析的基础上 , 重点介绍了目前流行的DL方法在除草机器人上的应用 , 并对几种基于DL的杂草检测算法的性能进行了系统评价 。
- 沉浸场景元宇宙 精细服务机器人
- 【玖越机器人】AGV——21世纪新时代的终结者
- 机器人|印度:禁止华为印度公司CEO回国
- 华为mate20x用了4年前的机器也够用
- 象棋AI机器人了解一下:让你从轻松取胜到“耻辱”认输
- 机器|OPPOFindX6Pro曝光,18+1TB配置跟上时代,旧款旗舰降价让路
- 多功能家电风口下,烹饪机器人会是最终方案?
- 烹饪|不用点外卖了!小米米家烹饪机器人发布:一机35用 5999元
- 本文转自:新民网图说:智能机器人助力智慧养老 采访对象供图“科技将推动新时代养老服务业‘...|AI养老如何落地?智慧养老既要技术精度更要人文温度
- 控制论原理让机器更容易“理解”人