特斯拉「纯视觉」自动驾驶发布,「感知冗余」还有必要吗?
特斯拉FSD Beta V9.0的发布,再次明确了马斯克对实现自动驾驶的一贯策略和态度。但对比目前传统车企和新势力通过更多的冗余传感和软件设置提升当自动驾驶安全性的方案,特斯拉的FSD方案目前让我们会产生小小的担忧。
1. 解析特斯拉FSD Beta V9.0
a) 特斯拉FSD Beta V9.0是什么?
【特斯拉「纯视觉」自动驾驶发布,「感知冗余」还有必要吗?】其实这次更新已经让大家期盼许久,毕竟「钢铁侠」早在2018年就已经承诺会推出新版 FSD 系统,众所周知,他鸽了;2019年,上演了同样的剧情,众所周知,他又鸽了;可能马斯克也深谙「事不过三」的精髓,终于,在美国时间的2021年 7 月 10 日,特斯拉FSD Beta V9.0在美国向用户推送了。相比起上一个版本,V9.0 或将是 FSD 迄今为止最大的一次更新。
文章插图
算法重写是FSD Beta V9.0最核心的变化,重写感知算法让特斯拉只要用纯视觉就可以实现城市级别的完全自动驾驶能力。也就是说,V9.0是特斯拉的纯视觉方案,系统将不再采用雷达数据。
文章插图
除此之外,FSD Beta V9.0中,驾驶可视化也得到了改进,可视化界面UI展示了更加精细的效果。
文章插图
之前V8版本的「赛博朋克」UI长这样,大家可以感受下变化。
剩下的更新内容概括如下:
l 在城市道路上进行变道
l 根据导航路线选择岔路
l 绕过其他车辆进行导航
l 在交叉路口进行转向
l 最高速度限制提到80英里/小时(129公里/小时)
b) 为什么特斯拉要用FSD方案?
因为生态要闭环,因为要降低成本!在2016年特斯拉与Mobileye分手后,目前特斯拉已经基本完成了其自动驾驶的闭环,同时也走上了一条『独木桥』,背后的商业逻辑还是降低成本,毕竟马斯克自己都说「激光雷达是昂贵的、不必要的传感器」。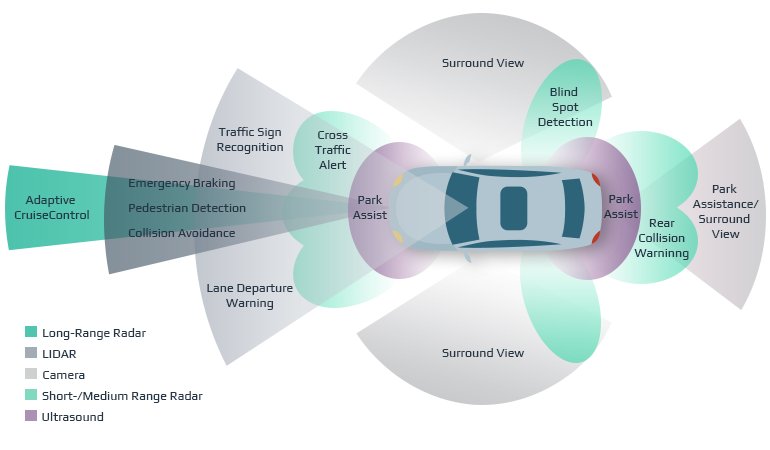
文章插图
邦老师认为,特斯拉若坚持这样发展,可能会把『独木桥』走成『康庄大道』,但更大概率是会将『独木桥』变成『走钢丝』,对比目前传统车企和新势力在自动驾驶方面通过更多的「冗余传感」和「软件设置」提升当下的安全性的解决方案,目前特斯拉的FSD显得有些单薄了。对于中国消费者『不怕一万,只怕万一』的谨慎心理来说,『单保险』很难在长远考虑上成为让人安心的首选。
2. 光靠视觉感知方案已足够?多出来的属于硬件性能过剩?——不,安全第一
a) 各类传感器的简单科普
目前新势力多会采用『视觉摄像头+毫米波雷达+超声波雷达+激光雷达传感器』的配置来保证自动驾驶的安全实现。
文章插图
邦老师就不完全展开每种传感器的详细介绍了,这里我做了张表格,大家可以有个大概的了解。
b) 硬件堆叠并非全部,但必须保证安全
可以看到每类传感器都有自己的局限性,所以需要强强联手以保万无一失。那这几类传感器协作出来的结果是怎么样的呢?
文章插图
邦老师整理了一下目前市面上主流的自动驾驶传感器配置方案,可以看到基本上每位选手都运用了多种类传感器协作,力求用「感知冗余」来更有效地保证自动驾驶的安全性。
网上有一种观点认为,这种堆满传感器硬件的车是硬件过剩,其实不然,前面讲到导致特斯拉和Mobileye分手的导火索,正是因为缺乏「感知冗余」而导致的『全球首例自动驾驶致死』事件。
- 普莉希拉|祖籍徐州的普莉希拉,嫁全球第5富豪扎克伯格,坐拥6530亿被说丑
- 40K:Battle|VR动作射击游戏「Warhammer 40K:Battle Sister」即将登陆Steam
- Games|Beat Games透露VR音游「Beat Saber」全新音乐方块类型
- 自动驾驶|华为首秀自动驾驶,王兴:特斯拉遇到技术与忽悠能力相当的对手了
- 美通社|驭势科技与Teksbotics打造无人驾驶递送车现身沙特 | 阿卜杜拉
- 河南消费者协会主任就辛巴燕窝事件发声。老狗称李四拉不了。
- 热泵低温被爆低温“歇菜”!特斯拉OTA解决:寒冷地区-15℃仍可能失效
- 官宣了!免费
- 摩托罗拉|Mate50也不香了,麒麟9000+5000万徕卡三摄,华为老旗舰降至冰点
- 布局潮范多元化圈层 看MAZDA3昂克赛拉如何玩出花样?