文章图片

文章图片
文章图片

文章图片

计算机视觉的飞速发展离不开大量图像标注数据的支撑 , 随着各类图像检测、识别算法的商业化落地 , 市场对图像标注精准度愈发严格 , 同时针对不同的应用场景 , 也衍生出了不同的图像标注方法 。
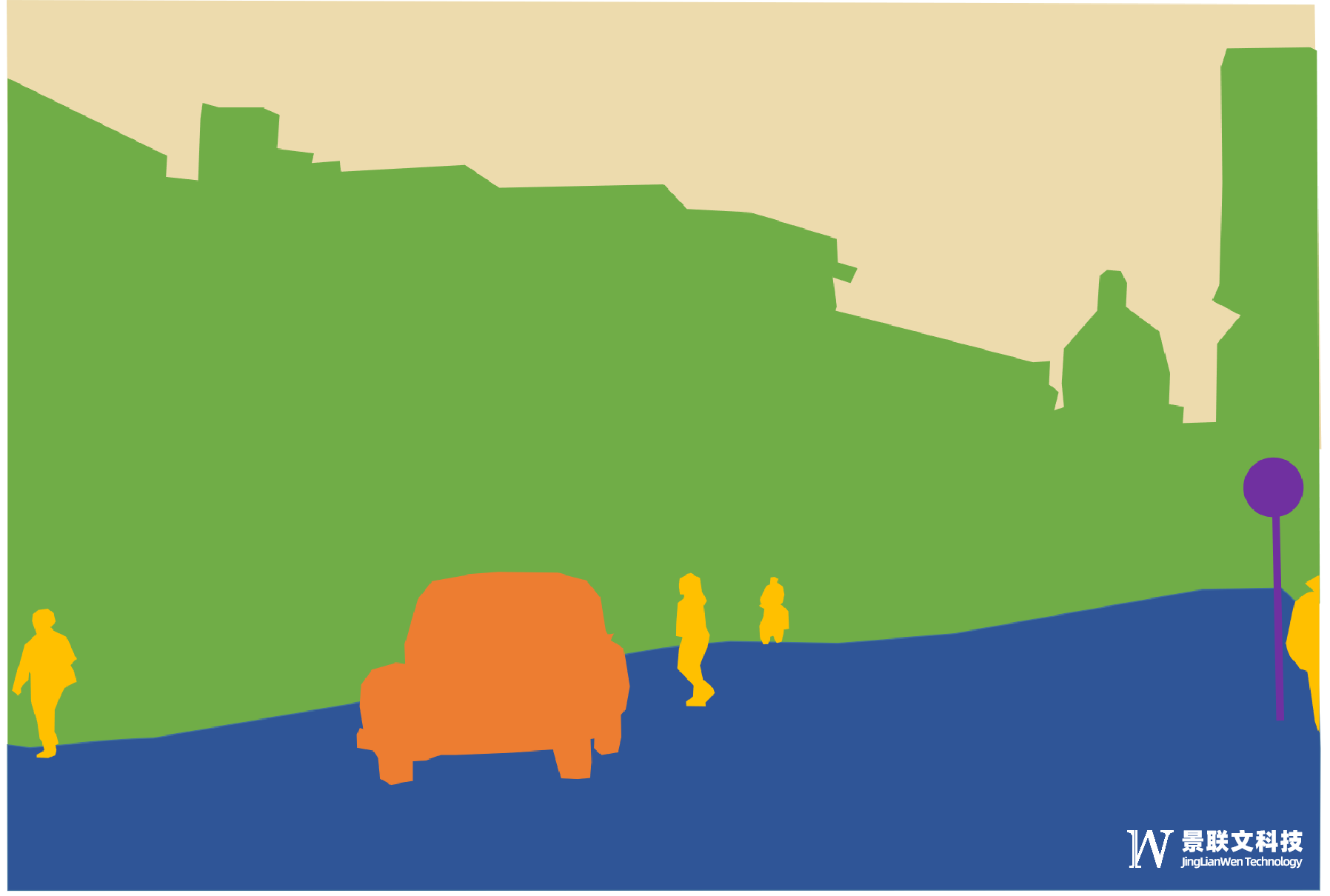
1、语义分割
语义分割是指根据物体的属性 , 对复杂不规则图片进行进行区域划分 , 并标注对应上属性 , 以帮助训练图像识别模型 , 常应用于自动驾驶、人机交互、虚拟现实等领域 。
2、矩形框标注
矩形框标注又叫拉框标注 , 是目前应用最广泛的一种图像标注方法 , 能够以一种相对简单、便捷的方式在图像或视频数据中 , 迅速框定指定目标对象 。
【自动驾驶|十种常见的图像标注方法 | 数据标注】3、多边形标注
多边形标注是指在静态图片中 , 使用多边形框 , 标注出不规则的目标物体 , 相对于矩形框标注 , 多边形标注能够更精准地框定目标 , 同时对于不规则物体 , 也更具针对性 。
4、关键点标注
关键点标注是指通过人工的方式 , 在规定位置标注上关键点 , 例如人脸特征点、人体骨骼连接点等 , 常用来训练面部识别模型以及统计模型 。
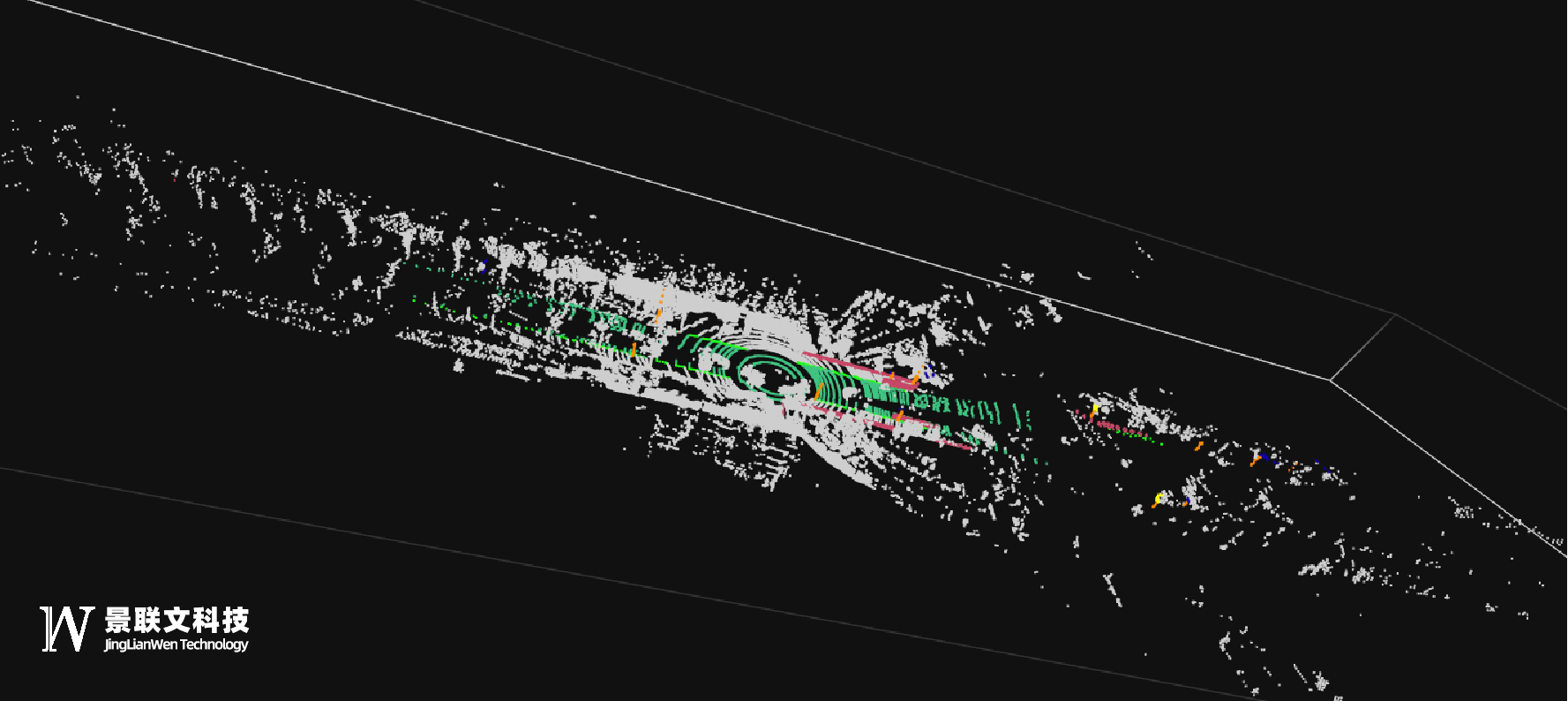
5、点云标注
点云是三维数据的一种重要表达方式 , 通过激光雷达等传感器 , 能够采集到各类障碍物以及其位置坐标 , 而标注员则需要将这些密集的点云分类 , 并标注上不同属性 , 常应用于自动驾驶领域 。
6、3D立方体标注
与点云标注不同 , 3D立方体标注还是基于二维平面图像的标注 , 标注员通过对立体物体的边缘框定 , 进而获得灭点 , 测量出物体之间的相对距离 。
7、2D/3D融合标注
2D/3D融合标注是指同时对2D和3D传感器所采集到的图像数据进行标注 , 并建立关联 。 该方法能够标注出物体在平面和立体中的位置和大小 , 帮助自动驾驶模型增强视觉和雷达感知 。
8、目标追踪
目标追踪是指在动态的图像中 , 进行抽帧标注 , 在每一帧图片中将目标物体标注出来 , 进而描述它们的运动轨迹 , 这类标注常应用于训练自动驾驶模型以及视频识别模型 。
9、OCR转写
OCR转写是对图像中的文字内容进行标记与转写 , 帮助训练和完善图片与文本识别模型 。 目前 , 景联文支持简体中文、繁体中文、英语、日语、韩语、法语、德语、西班牙语、阿拉伯语等十余种语言印刷或手写图片的转写 。
10、属性判别
属性判别是指通过人工或机器配合的方式 , 识别出图像中的目标物体 , 并将其标注上对应属性 。
- 本文转自:交通运输部货车逾期未年审 驾驶员未按期参加诚信考核 不仅会影响道路交通安全 而...|新功能上线!关联后,货车年审驾驶员诚信考核到期前自
- 本文转自:广州日报扫码就能给电池充电、充满电后可自动断电、远程实时监控还带有故障自动报警...|缓解充电难,共享智能电动车充电柜入驻杨箕村
- 赌博网站|腾讯建自动驾驶实验室,阿里获L4路测牌照,智驾行业要“变天”?
- 快讯!小米申请小米自动驾驶商标,回应雷军8月要和小米工程样车亮相:不实
- 从流水线到黑灯实验室,生命科学上游的自动化革命 36氪新风向
- 对讲机|一组未来科技感物品设计,对讲机用十种物品零件组合
- Uber自动驾驶卡车正式运营,技术是否成熟,能造成卡车司机失业
- 智能钣金仓储系统
- |坚丰机器人自动锁螺丝机的机械手与PLC
- 自动化|有线耳机音质排行,几款入门发烧级耳机,拥有丝滑声音质感