4d成像|自动驾驶感知中的新朋友,4D成像毫米波雷达
现如今的自动驾驶时代,摄像头、激光雷达、毫米波雷达这些词可以说在市场中耳熟能详,这些感知端各司其职,努力拥抱更加高阶的自动驾驶。这其中,毫米波雷达是较为成熟的自动驾驶感知系统,在多年的普及后制造成本也相对低廉,即使是自动驾驶的标杆产品也并未舍弃毫米波雷达。
文章插图
传统毫米波雷达传统毫米波雷达只能测出方位角、速度和距离这三方面信息(无法测高度),故立交桥、测速架、路牌这种需要测试高度来决策是否穿行的悬浮类障碍物,大概率会被传统毫米波雷达误处理为处于水平的障碍(潜在幽灵刹车风险)。因此,目前的L2级别自动驾驶车型都会让毫米波雷达配合摄像头使用,且在高速公路等特殊路况下普遍做法都会增加视觉感知的权重,减少甚至忽略毫米波雷达尤其对静止物感知的反馈。但视觉感知也并非十全十美,具体而言视觉感知需要对目标障碍物提前训练,不过训练图库终究是不能覆盖全面的,加之特定路况下毫米波雷达对静止物感知的权限降低,漏刹情况在所难免。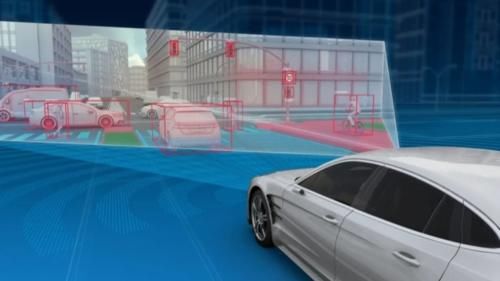
文章插图
4D毫米波雷达的优势【 4d成像|自动驾驶感知中的新朋友,4D成像毫米波雷达】毫米波雷达自身具有一个最大的优点,当面对恶劣天气,如雾霾、暴雨、漆黑染等,其感知过程具备较高可靠性与稳定性。因此,在增加了对目标垂直高度的测量能力后,4D毫米波雷达又可以进入一个全新的产业体系(更高阶自动驾驶解决方案)。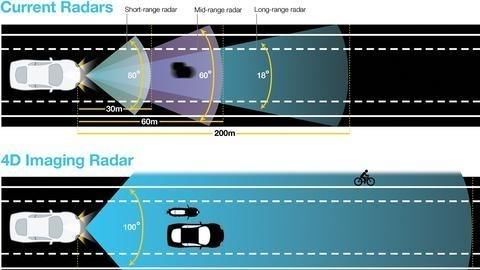
文章插图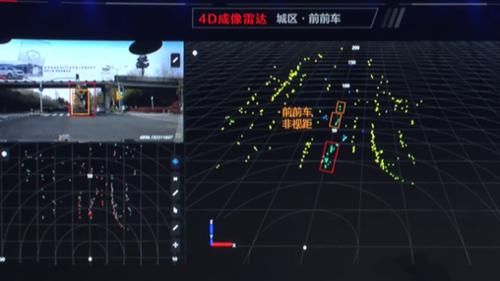
文章插图
同时,4D雷达分辨率较之以往传统版本是提升的,其可以实现对目标轮廓、类别以及行为的侦测。目前,市面上的传统毫米波雷达一般拥有12个信道(3发4收),而4D成像雷达的信道则可成几何式上扬。以上汽近期发布的R汽车 ES33为例,其采用了采埃孚的4D毫米波雷达,该雷达拥有192个信道,是传统毫米波雷达的16倍,具体原理为将多片毫米波雷达收发器(即MMIC)级联。而华为近期发布的毫米波雷达,也可达到12发24收,即288个信道,令人期待。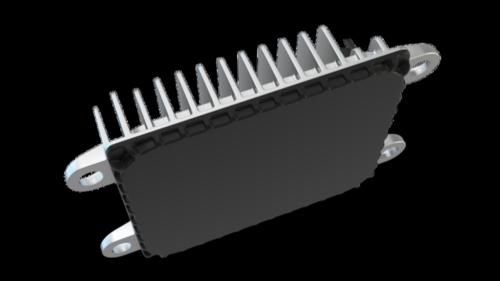
文章插图
文章插图
文章插图
按照物理定义,波长与频率的乘积等于固定值光速。频率越高,意味着波长越短,雷达天线波长越短。因此,高吉赫(GHz)雷达内部的射频电路和天线都相对较小,但也由于体积的原因,在一定体积下高吉赫雷达可以布置更多的天线单元,如此形成矩阵后的天线增益是极高,探测距离也会变得更远。由此可见,除可感知垂直体系外,4D雷达相比于传统毫米波探测距离会更远,信息获取效率也能更快。根据目前4D成像雷达的一些产品来看,其感知范围也可达到300米,并能根据多普勒频移捕捉物体相对本体是靠近还是远离的。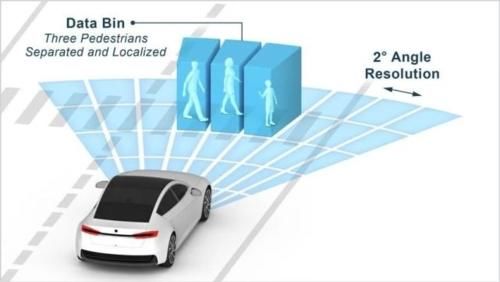
文章插图
发展趋势目前而言,各自动驾驶路径仍以相互融合为主要目标,毕竟各类路径都存在一定的局限性。因此,4D成像毫米波雷达在应用的过程中也是需要一个循序渐进的过程。以某光学科技公司开发中的试验为例,我们肉眼可以看到图中从右至左存在自行车、车辆以及行人,而一旁的成像则是来自成像毫米波雷达的反馈,令人欣喜的是确实可以看到最左边的行人在成像图中已被侦测到,不过由于人体对电磁波的反射性能要低于金属材质障碍一些,导致对行人的侦测也只能反应出一个小点。这也就侧面要求我们,不能一味的为成本降低而选择对任一路径的唐突放弃。
- 苹果|成像升级:iPhone 14 Pro/Pro Max或将配置4800万像素镜头
- 观光巴士|无人驾驶观光巴士走进湖滨
- 资讯丨智能DHT+高阶智能驾驶辅助,魏牌开启“0焦虑智能电动”新赛道
- 算力|不靠显卡!NVIDIA在中国焕发第二春:自动驾驶芯片被车厂爆买
- 自动驾驶|华为首秀自动驾驶,王兴:特斯拉遇到技术与忽悠能力相当的对手了
- 美通社|驭势科技与Teksbotics打造无人驾驶递送车现身沙特 | 阿卜杜拉
- 测试|解码自动驾驶商业化进阶的亦庄样本
- 加速行业变革!比亚迪联手美国公司发布无人驾驶配送车
- 京东|京东在荷兰开设全自动智能商店
- 圆通速递|无人驾驶递送车现身沙特,驭势科技与Teksbotics强强联合打造