文章图片
文章图片

文章图片
文章图片

文章图片

小型装配机器人之所以获得越来越多包装企业的青睐 , 正在于它如今已可以胜任包括装配在内的各种包装生产任务 , 包括所有材料的处理 , 如取放、装卸、包装成型等包装前端流程相关的工序 , 以及打标签、检验、抽样等加工工序 。
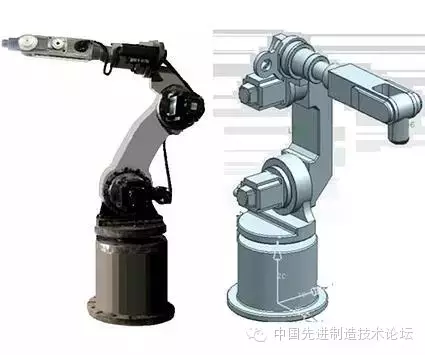
需要指出的是 , 本文所说的小型装配机器人 , 是指最大有效载荷可达20 kg(44磅)、最远处理距离可达1300mm(51英寸)的机器人 。 这类机器人有两种基本类型:四轴SCARA机器人(以下简称四轴机器人)和六轴关节式机器人(以下简称六轴机器人) 。 其中 , 四轴机器人是特别为高速取放作业而设计的 , 而六轴机器人则提供了更高的生产运动灵活性 。
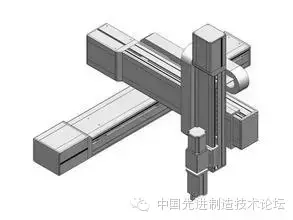
四轴机器人
小型装配机器人中 , “四轴SCARA机器人”是指“选择性装配关节机器臂” , 即四轴机器人的手臂部分可以在一个几何平面内自由移动 。
SCARA机器人的前两个关节可以在水平面上左右自由旋转 。 第三个关节由一个称为羽毛(quill)的金属杆和夹持器组成 。 该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转 , 但不能倾斜 。
这种独特的设计使四轴机器人具有很强的刚性 , 从而使它们能够胜任高速和高重复性的工作 。 在包装应用中 , 四轴机器人擅长高速取放和其他材料处理任务 。
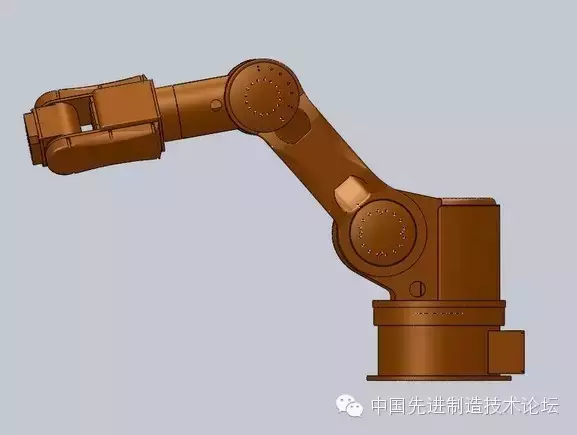
六轴机器人
六轴机器人比四轴机器人多两个关节 , 因此有更多的“行动自由度” 。
六轴机器人的第一个关节能像四轴机器人一样在水平面自由旋转 , 后两个关节能在垂直平面移动 。 此外 , 六轴机器人有一个“手臂” , 两个“腕”关节 , 这让它具有人类的手臂和手腕类似的能力 。
六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件 , 以特殊的角度放入包装产品里 。 他们还可以执行许多由熟练工人才能完成的操作 。
机器人自动化包装应用指南
在包装生产线上整合机器人技术并得以应用 , 其实没有有些人想象的那么复杂、危险与高成本 , 反而是非常简易而安全的 , 同时也可能获得经济优势 。
1.生产安全性
在安装时 , 机器人通常被正立或倒置安装在封闭的自动化工作单元上 。 工作单元的外层一般由铝框、防碎塑料或孔状金属网包裹 。 机器人及其他相关设备一般使用螺栓固定在工作单元的钢铁机台平面上 。 工作单元的采用使得工作人员可在外围观察机器人工作台的工作状况 , 而无须进入工作单元内部 。
为安全起见 , 一旦打开了工作单元的检修门 , 机器人将自动停止工作 。 对于那些不能完全密闭在一个工作单元内的机器人 , 如门帘、压力感应地垫等装置同样可以提供自动关闭功能 。
- 机械革命旷世水冷游戏本拆机图公布,水冷管道贯穿 CPU 和 GPU
- 小米12|小米12最吸引我的就是尺寸,实际单手握持效果,和宣传图相近
- 一加科技|iPhone13Pro、一加9Pro和一加10pro之间,该如何选?
- 工业和信息化部运行监测协调局|工信部:未来较长一段时期内芯片供应将依然处于紧张状态
- 联发科|友商诚意十足,骁龙888Plus只卖1799元,还有五千大电池和1亿像素
- galaxy s21|小屏旗舰又一个选择!和爆款小米12相比,三星S21 FE有啥优势?
- 浏览器|真我GT2 Pro和OPPO Find X3相比较,该如何选?
- apu|采用IR2153和IGBT的高压电流半桥驱动器IR2153
- 京东|Meta首款智能手表专利曝光,配备多颗镜头用于 AR 和 VR 等用途
- 虚拟卡|沃达丰和高通等巨头欲制定iSIM虚拟卡新标准