文章插图
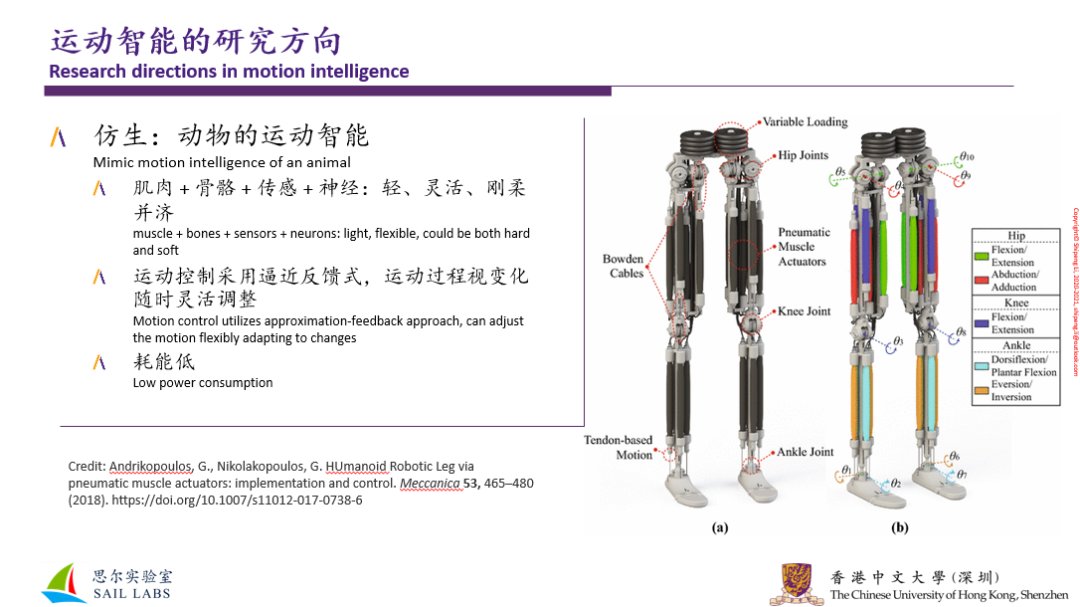
因此,运动智能的一个重要研究方向是:仿生。仿照动物的运动智能,例如运动控制采用逼近反馈式,运动过程视变化随时灵活调整。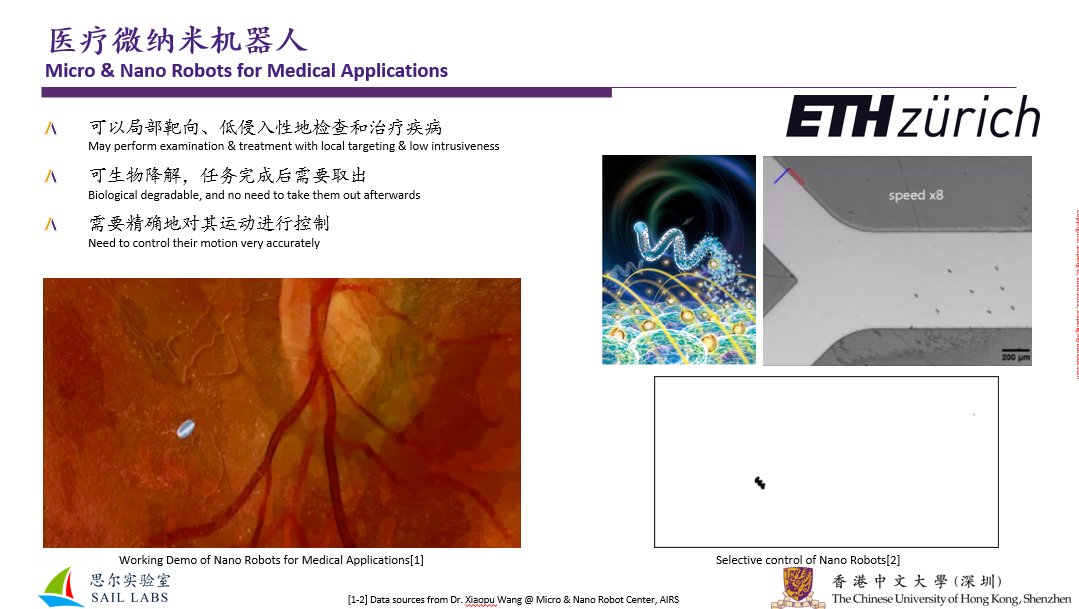
文章插图
如果说机器人是靠“内力”驱动,而医疗微纳米机器人是“外力”研究方向的代表。例如依靠磁力,小机器人精确地将药物从一个管道运送到另一个管道。在人机谐作层面,区别于协作,“谐作”代表人机协作中的耦合、交互、增强、互补、协作、和谐等意思。人机谐作的目标是:不需要告诉机器人类的意图,机器就能领会,从而达到人机的无缝连接。在达成人机谐作的过程中,重点研究人机自然交互、感知及增强。具体可能包括:生物特征检测和识别、人机接口、脑机接口、语音识别、动作识别、表情识别、语言理解、意图理解、体态感知、无隙增强,以及在扩展现实与远程现实的延伸等等。人机增强智能方面,今天的机器学习框架大都是基于大数据的深度学习框架,肯定会遇到机器智能处理不了的情景。这对于某些高风险领域,例如自动驾驶、金融等来说是致命的。针对这一问题,当前的解决方案是“人类接管”。这会涉及三个核心问题:
- 核心问题1:机器智能如何感知自己处理不了一些情况,而主动要求人来接管?
- 核心问题2:什么时候人类可以完全放手给机器自主完成任务?
- 核心问题3:什么样的人机交互设计能充分发挥人和机器各自的长处,同时又无需非必要地麻烦对方?
三个核心问题如果无法解决,会导致一些困境。例如,以自动驾驶为例,目前安全员并不是开了“自动”功能就一劳永逸,仍然需要时时监测路况与路线,一刻都不能分神。这其实增加了安全员的负担,因为在没有自动驾驶的时候,人类对自己的驾驶环境会有一定的预测,而机器驾驶的情况人类无法预测。人机增强机体也属于人机谐作的一个领域,能够帮助人类增强物理机体能力,完成一些人类自身体力完不成的事情。但机器可能过于复杂,需要人类培训后才能操作。人机增强机体的未来目标是实现人与机器和谐共处,操控起来如同人类的自己的器官一样自然。其中,涉及的核心研究课题包括:机器感知人的意图、人的姿态、理解人的自然语言命令、肢体语言等等,从而让机器以最适合人类接受、恰到好处的平滑方式帮助人解决问题。
文章插图
目前单智能体已经可以完成许多任务,但如何发挥每个智能体集合起来的威力?这涉及群体协作的研究方向。在仓储场景下,存在许多抓取分类的机器人,如果能够有效调度,那么必将大大提高工作效率。当前主流的调度方式是中心化的控制方式,但面对成千上万的规模的智能体,则需要非中心化的控制,允许智能体之间存在自主行为,在相互协作的同时,还能“做自己的事”。即单独的有智能可独立行动的智能体,通过协作而达到的更高效的群体/系统智能和行为。