集微咨询:通往自动驾驶的路上,激光雷达大有所为,但也任重道远
在通往自动驾驶的路上,激光雷达俨然成为车企布局的必选项。资本方、市场侧、消费端的热情与需求都催生其快速发展。那么,激光雷达在自动驾驶中究竟扮演什么角色?激光雷达的技术路线有哪些?目前行业竞争格局如何?以下文章将一一说明。
1.激光雷达扮演什么角色?
在自动驾驶中,缺一不可的三大要素包括感知、决策和执行。“感知”是一切的起点和基石,只有不断提高感知性能,才有推动更高级别自动驾驶落地的可能,用于感知的传感器主要有摄像头、毫米波雷达、超声波雷达、激光雷达。
目前,自动驾驶感知方案主要分为以特斯拉为代表的视觉系和以Waymo为代表的激光雷达系两种流派。视觉系主要以摄像头为主导,配合毫米波雷达、超声波雷达等完成感知任务;激光雷达系以激光雷达为核心,配合摄像头、毫米波雷达、超声波传感器等达到感知目的。
文章插图
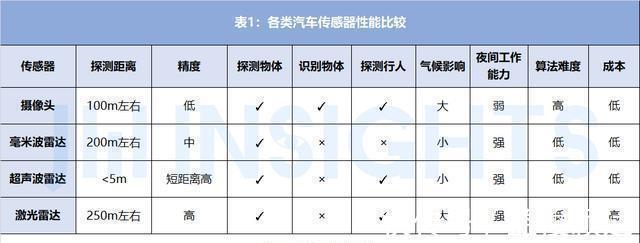
车载摄像头:
低成本,但精度较差,易受天气影响。车载摄像头通过镜头采集外部数据并根据算法进行图像识别,能够感知车辆周边的路况,实现前向碰撞预警(FCW),车道偏离报警(LDW)等ADAS功能。汽车摄像头根据摄像头个数可以分为单目、双目和多目,根据安装位置可以分为前视、后视、侧视、环视。目前技术成熟且价格便宜,但是精度较差,需要借助深度算法,且易受恶劣天气影响,逆光和光影复杂环境下效果较差,难以实现全天候测距。
毫米波雷达:
精度高,穿透力强,不受天气影响,但对行人等非金属物体探测能力弱。目前市场上主流的车载毫米波雷达频段为24GHz(用于短中距离雷达,15~30m)和77GHz(用于长距离雷达,10~200m)。77GHz产品在性能和体积上都更具优势,其分辨率更高,体积也小了1/3。毫米波雷达能够大范围检测车辆的运行情况,可实现自适应巡航(ACC)、自动紧急刹车(AEB)等ADAS功能。其最大优势在于可弥补摄像头的不足,具有精度高、探测性能强的特点。此外,毫米波雷达对大气的衰减小,穿透雾、灰尘的能力强,因此抗干扰性较强,还能够全天候全天时工作。但毫米波雷达的固有属性使得其对行人等非金属物体反射波较弱,难以对行人进行识别。
超声波雷达:
局限于近距离低速场景应用。超声波雷达是基于超声波固有的声波折射、反射、干涉等基本物理特性而形成。其优势是造价较低,可大量配置,数据处理简单,且不受光照条件影响。不过超声波测量远距离目标的回波信号较弱,只能探测近距离物体。常用于自动泊车(APA)。
激光雷达:
精度高,探测能力强,易受天气影响,当前成本较高。激光雷达通过向被测目标发射激光,测量反射或散射信号的到达时间、强弱程度等数据,以确定目标的距离,而且可以通过采取的点云数据,利用3D建模构建数据模型。相较于毫米波雷达,激光雷达能加强对行人、静态障碍物、小物体等障碍物的监测能力;相比于摄像头,激光雷达的探测距离更远。不过易受恶劣天气等影响,且目前成本相对较高。
结论1:
综上看出,不同的汽车传感器,各有优缺点,灵活组合使用可以满足自动驾驶不同阶段的需求。摄像头+毫米波雷达+超声波雷达的视觉系方案一般可实现AEB、ACC、TJP、LDWS等预警类、识别类ADAS功能。但往更高级别自动驾驶演进,驾驶任务从人转移给系统,需要感知方案有充分的安全冗余。现阶段,视觉方案仍存在盲区,以特斯拉为例,特斯拉的FSD是一套目前水平在L2+级,未来目标是全自动驾驶的系统。特斯拉近几年的多起交通安全事故,都显示出FSD系统仍然存在诸多安全盲点。
- 亚信科技(01675.HK)拟5.12亿元收购艾瑞咨询94.23%股权|最前线 | 格隆汇
- GPU|AI计算平台公司“登临科技”完成新一轮战略融资
- 业务能力|亚信科技宣布收购艾瑞咨询 持续加码数字化运营及数智化转型
- 华与华品牌咨询公司增资至200万,增幅达300%
- 战略咨询委员|宏光半导体(06908)成立全球战略咨询委员会
- im|艾瑞咨询:预计2024年全球互联网通信云市场规模达182亿美元,仍保持40%以上的高速增长
- 缺料|集邦咨询:零部件缺料状况持续冲击整机出货,PC及笔电端受影响程度最低
- 整机|集邦咨询:零部件缺料状况持续冲击整机出货,PC及笔电端受影响程度最低
- 集微网消息|amd2021财年收入增长65%
- 企业退税上“马小二”、政策咨询上“马小二”、租赁厂房上“马小二”、申请人才公寓上“马小二...|找政策、招人才、寻厂房......这个小程序马桥企业都