文章插图
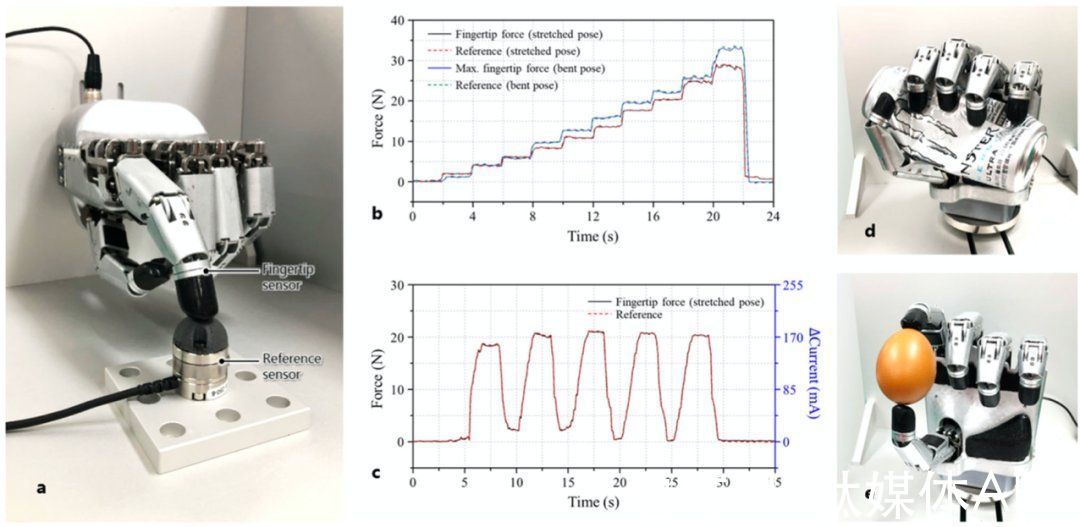
图|性能分析(来源:Nature Communications)
通过指尖传感器确定接触点处接触力的大小,并将相同的力施加到指尖和参考传感器上,手指施加的力依次递增,而 25 mA 电流每 2 秒递增一次,这个手指施加的最大力在伸展姿势为 28 N,弯曲姿势为 34 N,验证了手指施加的静态力的准确性,平均误差为 0.9 N。响应通常匹配良好,无临界误差,在执行精细任务时具有实现力控制的巨大潜力。

文章插图
文章插图
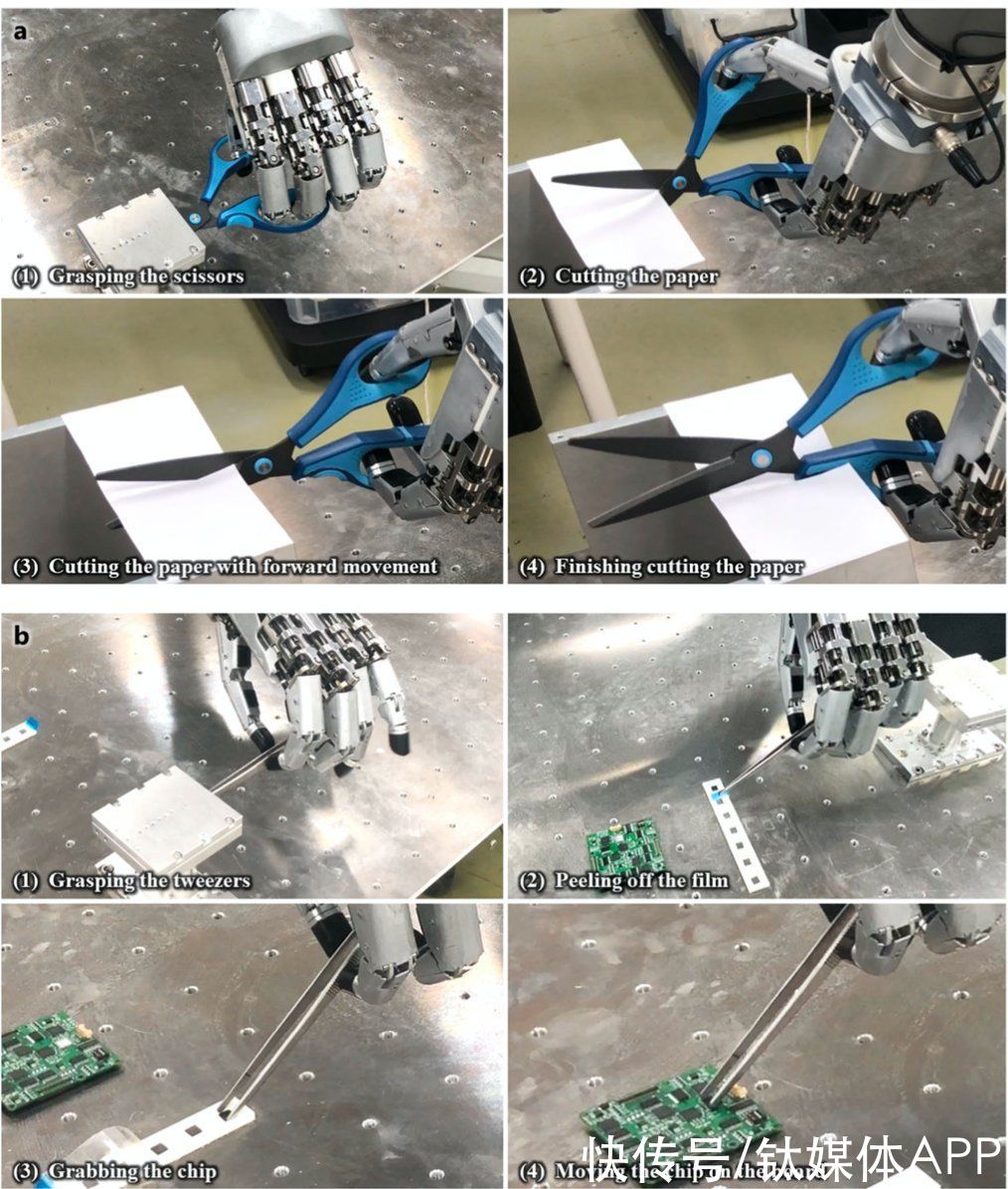
图|机器手进行各种抓握测试和精细化操作(来源:Nature Communications)
在测试环节,开发的手被用来捏扁铝易拉罐,当时在每个手指上测得的最大力为 25 N;也可以用这只手安全地抓住鸡蛋,不会捏碎;为了确认使用该机器手操纵工具的可能性,将手与商业机械手相连进行了剪纸实验,因为在日常生活中使用剪刀进行剪纸是一项需要高度灵巧的任务。
最后一项测试涉及用镊子夹住和移动小物体,操纵器移动,使镊子的尖端能够握住小芯片,手执行抓取动作,使镊子剥开芯片的盖子并抓取芯片,接下来,将物体移动到另一个位置,松开镊子以完成操作,一切都顺利完成。
文章插图
【 关节|轻松抓鸡蛋、剪纸、夹芯片,这只“机械爪”堪比人手】图|机器手用镊子夹起芯片(来源:Nature Communications)
降低商业应用门槛研究人员表示,基于连杆驱动机构的灵巧拟人机械手 ILDA 确保了连杆驱动机构的原始优势,如关节的双向控制、鲁棒性以及易于制造和维护等,同时,它确保了具有 20 个关节的 15 自由度主动移动,手指之间有足够的工作空间,以及较高的指尖力,它的重量也更小,尺寸紧凑,并为传感器集成提供了空间。
ILDA 机器手可以很容易地连接到现有的商业机械臂或正在开发的机械臂上,而不需要额外的部件,关键优势在于手部表现出高性能,并且零件配置与手部本身相结合。
这款机器手可以根据不同物体的形状执行不同类型的抓取。剪刀和镊子用于确定在日常生活中操作工具的可能性,虽然很难准确量化手在使用剪刀操作工具时的有效性,但他们使用手的多个自由度并通过关节的双向控制来执行组合运动。
具有超高自由度的灵巧拟人机器手的开发仍然是一个悬而未决的问题,需要从科学和工程的角度持续进行研究。但在这项研究中,研究人员试图最大限度地提高机器手在各个维度的性能。
到目前为止,业界已经开发出了许多相对灵巧的机器人手,但由于复杂的制造过程和维护困难导致的高成本限制了它们的商业化落地使用,而这款ILDA机器手的适用性,将通过功能和成本的综合优化,能够扩展到实际研究领域和许多行业应用,推进机器手的进一步研究。
这么灵活的机器手,将来能不能用到人身上,帮助残疾人完成一些日常操作呢?可以拭目以待了。
参考资料:
https://www.nature.com/articles/s41467-021-27261-0
- 城市|新华社:武汉抢抓数字经济新“基”遇
- 科大讯飞|让会议记录变得更轻松,科大讯飞智能办公本X2
- 大脑|(稳健前行开新局)武汉:抢抓数字经济新“基”遇
- 黑客|闻名世界的黑客组织REvil被抓获:现场缴获大量现金
- 荣耀|荣耀手表GS 3发布:高端精英的绅士风!流量密码抓对了
- 米家|从零开始,基于群晖轻松玩转开源homeassistant智能家居前期搭建
- ?粉丝网上辱骂主播现实被抓!女主播翻车露大白腿,姿势销魂!
- 如何实现SSD到SSD整盘对拷?固态硬盘极简克隆法,一键轻松搞定
- 又香又皮实的茶花香妃,冬季这样养,开花大花期长,轻松爆盆
- 怎样才能快速抢到好友发的微信红包?教你3招,轻松搞定