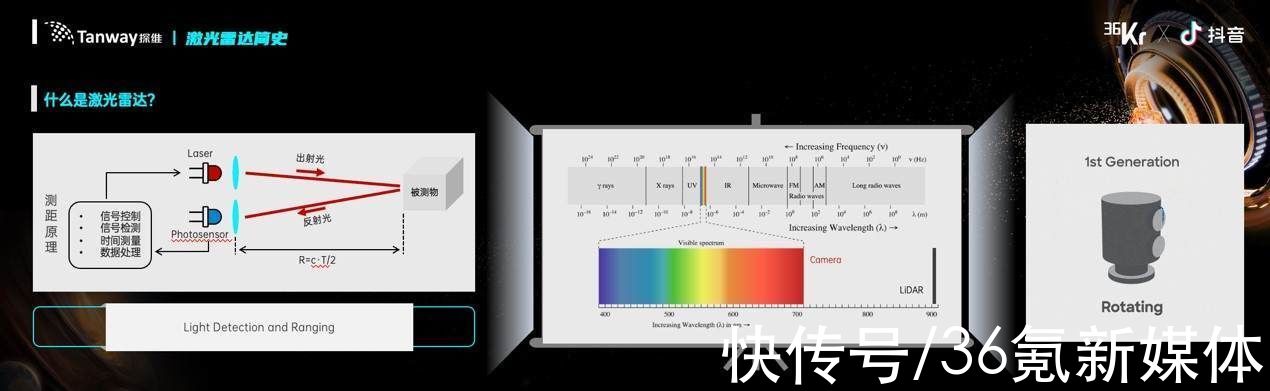
激光雷达最核心的原理是利用ToF飞行时间做激光测距,通过激光的发射和接收完成飞行时间的高精度测量,最后解析出来探测距离和每个3D场景的激光点,所应用到的光学波段是近红外。
文章插图
激光雷达原理
如图可以看出,Camera用的是400到700nm的可见光波段,目前主流的激光雷达用的是905nm近红外的波段,两种波段比较接近,让我们在图像融合方面得以发挥。
最早我们应用在自动驾驶车上是中间机械式的激光雷达,后续为了解决成本、量产、稳定性一系列的问题,涌现了很多混合固态和固态产品。目前主流的还是利用振镜,包括MEMS、棱镜、转镜,都是通过混合固态的扫描实现3D场景的感知,未来会在不同场景下进一步解决成本和车规级问题。在测距方式上,目前相对成熟的是ToF飞行时间测距测量,未来还会有FMCW技术可以实现距离与速度的同步提取。
激光雷达应用场景非常丰富,从自动驾驶到ADAS、无人机器人、智慧物流、工业这些场景,激光雷达都作为感知系统最核心的传感器提供丰富感知的能力。同时,探维科技的激光雷达也在车路协同、智慧高速和测绘等场景得到了广泛的应用。

文章插图
探维科技CEO&创始人王世玮
激光雷达行业近几年的发展一直在关心一件事情,即是它的“不可能”三角问题。激光作为高精度的传感设备,最大的优势就是性能,分辨率和探测距离,但是难点在于如何保持车规级的环境稳定性和量产交付的质量,同时还把成本控制下来,这个对于激光雷达整个系统带来非常大的挑战——如何让“不可能”三角最终成为可能性,最终支持自动驾驶系统实现量产和落地。
我们探维科技在激光雷达技术的突破层面,主要做了两件比较有代表性的事情。一个是ALS平台,探维科技在MEMS基础上做进一步的提升,采用的是单轴扫描,替代双轴MEMS镜。单轴扫描在光学系统当中最经典、最传统,同时也是稳定性最好的扫描方式,单轴扫描系统是实现激光雷达车规级的一个最有途径。
在单轴方案中,难点是怎么做多线,保证实现更丰富的3D采样,我们在ALS平台当中整合了阵列化的激光发射器和接收器,通过阵列化的器件可以更好地集成多线的感知效果,同时还能保证整个光学装调难度降到最低。我们在北京、苏州量产产线都能把组装调试时间从原来的几天、一天,最终降低到一分钟,甚至几十秒的调光时间。
同时,我们自主开发设计的基于模拟信号处理的飞行时间芯片也是进一步降低了我们的硬件成本,也摆脱了对于垄断供应商对于器件层面的限制。
文章插图
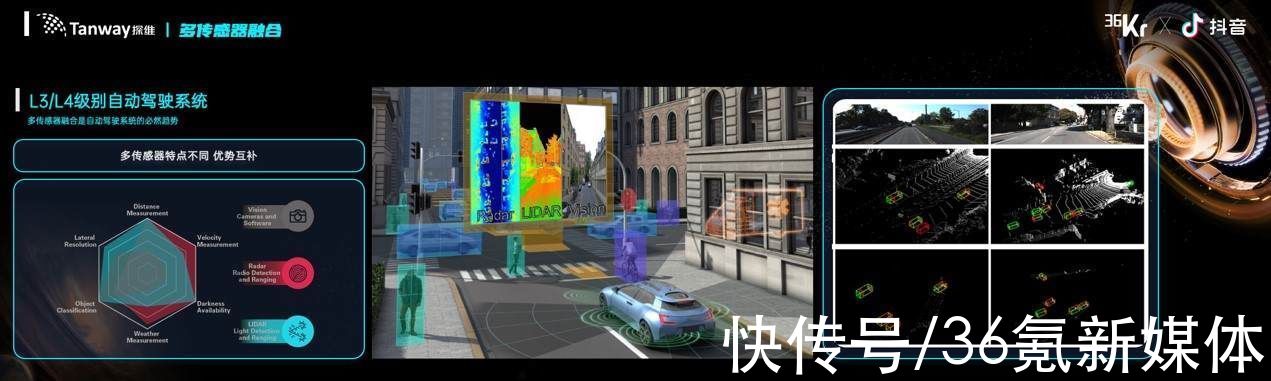
L3/L4自动驾驶系统
第二件事是传感器融合。我们的产品是基于硬件及图像前融合的固态激光雷达。自动驾驶在L3开始再到L4、L5,多传感器融合是一个必然的发展路线,左边是一个经典的雷达图,可以看到Camera、LiDAR还有毫米波在不同环境、不同场景下各自有优势的。目前绝大部分自动驾驶系统都会把LiDAR点云、图像识别、毫米波防碰撞基础功能整合到一起,大家都在关注怎么样让摄像头激光的点云和其他传感器更好地整合提高效率,提升感知系统的安全性。
过去不管是ADAS系统,还是一些自动驾驶系统所面对的很多挑战,或者说安全性的风险,绝大部分都来自于感知的失效。如果激光雷达或者感知系统作为机器的“眼睛”,它看不见天空的障碍物或者看不清周围的环境,算法就很难保证系统的安全。
- 车路协同|百度、阿里、蘑菇车联的车路协同简史:播种、沉寂、萌芽
- 基于蜜网的工业互联网协同检测技术研究
- 广州市住房和城乡建设局|聚焦车路一体化发展,广州在琶洲核心区搭建“车城网”平台
- 近日|2022用友商旅云生态协同峰会在上海举办
- 华为|华为二度试水造车,“问界M5”来袭,它还能在造车路上走多远?
- 协同办公|数智化协同办公不断增长
- 金融科技|36氪首发|提供供应链信用协同服务,「众企安链」获数千万人民币A轮融资
- 产业技术|协同推进制造业智能化转型
- 提供供应链信用协同服务,“众企安链”获数千万人民币A轮融资
- 36氪首发|提供供应链信用协同服务,“众企安链”获数千万人民币A轮融资