调度|《炬丰科技-半导体工艺》半导体晶圆制造调度方法
书籍:《炬丰科技-半导体工艺》
文章:半导体晶圆制造调度方法
编号:JFKJ-21-707
作者:炬丰科技
摘要
在本研究中,我们将一个半导体晶圆制造过程建模为一个复杂的工作车间,并采用一种改进的移动瓶颈启发式算法(MSBH)来促进完工时间、周期时间和总加权延迟的多标准优化。合意性功能在MSBH的两个不同级别实现问题解决程序级别(SSP级别)和机器关键度度量级别(MCM级别)。此外,我们还提出了两种不同的选择关键工具组的方法:(1)局部多模型方法,它基于来自SSP级别的局部合意性值来选择关键工具组;(2)全局多模型方法,它基于关键工具组对整个析取图合意性的影响来选择关键工具组。结果证明了基于期望的方法同时最小化所有三个目标的能力。
介绍
本文中,我们讨论了一种新的半导体晶圆制造设施(“晶圆厂”)调度方法的开发,该方法试图优化一个聚合函数,该函数结合了吞吐量(相当于最大完工时间(Cmax))、平均周期时间(CT,类似于完成时间的总和)和OTD(最小化总加权延迟(TWT))。
测试和实验
表2显示了我们在本文中研究的SSP和MCM级别的不同方法组合。方法1是梅森等人的MSBH。寻求最小化行波管。其他五种方法结合了合意性和行波管最小化。
我们在实验测试平台上检验了两种不同的复杂工作车间模型。第一个模型,El Adl等人的“Minifab”模型。我们检查的第二个模型基于Fowler等人的Testbed数据集,梅森等人缩减了包含83个工具组的完整数据集。
之前,我们讨论了在MCM和SSP级别为三个不同目标设置上限和目标限制的过程。然而,我们仍然必须确定如何为α∑设置合意性权重zα。由于三个权重混合在一起成为一个单一的目标函数,因此它们之间的相对比例非常重要。表3描述了我们实验中使用的理想权重设置。
模拟环境的主要目的是模拟一个真实的晶圆制造工厂在不同调度下的行为,该调度由移动瓶颈启发式算法提供。该方法将大型作业车间实例分解为适合时间窗口的较小实例,并在每个时间窗口独立应用“移动瓶颈”过程。
文章插图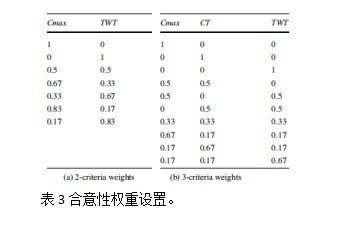
文章插图
实验结果
尽管SSP-TWT在行波管性能方面是优越的,但与CR和SSP-Des相比,它的Cmax合意性非常差。因此,它的综合可取性并不好。CR和FIFO有很高的Cmax要求,但它们各自的行波管要求在所有20个实例中都很低。SSP-Des在这两个目标上都表现得相当好,因此在20个小型工厂问题实例中具有最佳的组合合意性。SSP-TWT与SSP-Des在20个实例中只有一个实例(实例17)具有最佳的合意性.SSP-Des和SSP-Des*之间的比较表明,SSP-Des比SSP-Des*具有大约9%的可取性。此外,前者的表现比后者更一致(见标准差结果)。然而,由于穷举合意性权重搜索,SSP-Des在计算上更昂贵。因此,如果需要一个在两个目标上都“好”的快速解决方案,那么小型工厂问题实例应该使用SSP-Des*。
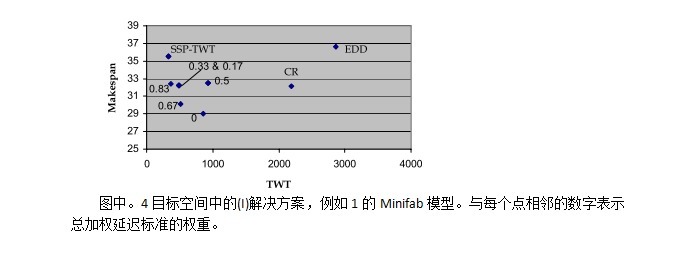
图4和图5显示了两个实验性MiniFab实例的总加权延迟和完工时间的目标空间图。
文章插图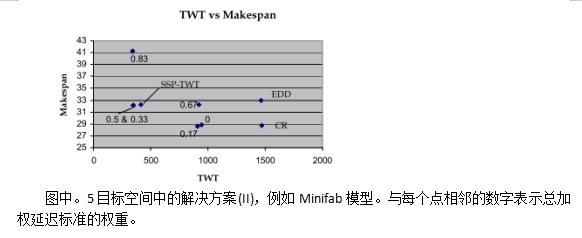
文章插图
结论
半导体晶圆制造是一个复杂的过程,通常需要数百个步骤,具有独特的功能,如再入流程、批处理机和顺序相关设置。(2002)考虑在复杂的工作车间中使行波管最小化。在此基础上,我们在MSBH的两个不同层次上使用了合意性方法,即SSP层次和MCM层次,并提出了五种新的方法来调度复杂的作业车间。使用文献中两个有代表性的复杂工作车间模型,我们比较了我们的方法与原始MSBH(方法“SSP-TWT_MCM-TWT”)以及三个调度规则。为两个代表性的复杂作业车间模型(Minifab的20个作业实例和MTD1的50个作业实例)中的每一个生成并分析了20个问题实例。在MSBH之外,我们使用合意性函数来比较不同竞争方法生成的时间表。实验结果表明,当三个目标被同等重视时,合意性方法的性能明显优于MSBH规则和调度规则。虽然在Minifab实验中观察到了Cmax和行波管之间的折衷,但在MTD1实验中,合意性方法在所有三个目标中表现最好。从我们的实验中得出的一个重要结论是,在过磷酸钙水平上使用合意性方法始终会产生优异的结果。
- text|《2021大数据产业年度创新技术突破》榜重磅发布丨金猿奖
- 《吉星高照》的谢怜杀青啦,半年的拍摄
- 小米12|自研动态性能调度!小姐姐实测小米12 Pro《王者荣耀》:功耗下降20%
- 《消逝的光芒》开发商保证:游戏将获得 5 年的后续内容更新
- 《长津湖之水门桥》释出终极海报及剧照:准备战斗
- 今日|《战神4》pc版正式解锁dlss和fsr性能表现
- 《三生有幸遇上你》大结局:侯爵遇险,十一舍命相救
- 上海尊宝音响多款产品获《影音极品》器材大赏奖项
- 拯救者|首款无挖孔骁龙8旗舰!拯救者Y90实测30分钟《原神》平均帧率59.2
- 创新大赛|RTE创新大赛三强揭晓 !《实时互动场景创新生态报告》重磅发布