IT之家 1 月 16 日消息,据中国科学院上海微系统与信息技术研究所消息,由地震、滑坡、塌方等掩埋事故造成的视觉感知障碍对受困人员的搜索和定位造成阻碍。
为了确保最佳救援时机,提升搜救成功率和生还率,依托国家科技创新 2030“新一代人工智能”重大项目,针对极端环境无视觉输入情况下对受困人员的识别与救援需求,中国科学院上海微系统与信息技术研究所研究员陶虎团队受自然界星鼻鼹鼠“触嗅融合”感知启发,将 MEMS 嗅觉、触觉柔性传感器阵列与多模态机器学习算法融合,构建了仿星鼻鼹鼠触嗅一体智能机械手(如图)。
文章插图
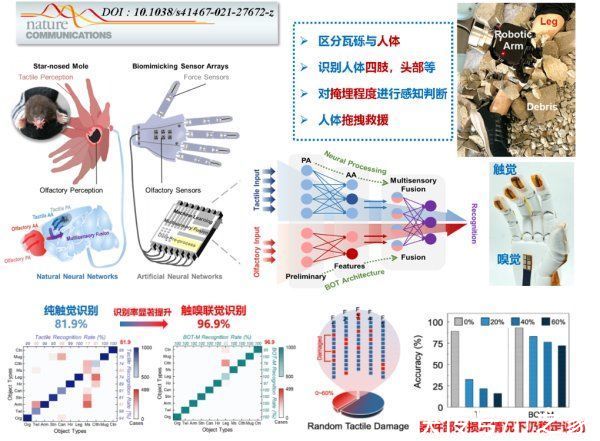
▲ 用于应急救援掩埋场景的触嗅一体仿生智能机械手
据介绍,得益于硅基 MEMS 气体传感器(灵敏度超越人类 1 个数量级)、压力传感器(探测限超越人类 1 个数量级)的优异性能,该机械手手指触摸物体后可准确获取其局部微形貌、材质硬度和整体轮廓等关键特征,掌心可同步嗅出物体“指纹”气味,进一步通过仿生触嗅联觉 (BOT) 机器学习神经网络实时处理,最终完成识别人体、确认部位、判断掩埋状态、移开障碍物、闭环救援。
IT之家了解到,上海微系统所科研人员与应急管理部上海消防研究所合作,通过到一线消防救援单位实地调研,真实还原构建了人体被瓦砾石堆覆盖的掩埋场景,在此环境下对包括人体在内的 11 种典型物体进行识别,触嗅联觉识别准确率达 96.9%,较单一感觉提升了 15%。
相较麻省理工学院发表于 Nature(DOI:10.1038 / s41586-019-1234-z)的单一触觉(548 个传感器)感知研究,该工作通过触(70 个)、嗅(6 个)联觉,仅使用 1/7 数量的传感器,达到了更理想的识别目的,并且缩小后的传感器规模和样本量更适合复杂环境、资源有限条件下的快速反应和应用。此外,面对在实际救援中常见的存在干扰气体或器件部分损坏等情况,通过多模态感知的互补和神经网络的快速调节,该系统仍保持良好的准确率(>80%)。
【 智能|地震救人新突破!中科院研制出触嗅一体智能仿生机械手】相关研究成果以 A star-nose-like tactile-olfactory bionic sensing array for robust object recognition in non-visual environments 为题,于 2022 年 1 月 10 日发表在 Nature Communications 上。
- 苹果|国内首款支持苹果HomeKit的智能门锁发布:iPhone一碰即开门
- CPU|元宇宙+高端制造+人工智能!公司已投高科技超100亿,股价仅3元
- 凌晨,南京市雨花台区地震!
- 智能制造|企业转型的新时代,夹缝中求生存
- DeepMind首席科学家:比起机器智能,我更担心人类智能造成的灾难
- Aqara 智能门锁 A100 Pro 发布:支持苹果“家庭钥匙”解锁
- 资讯丨智能DHT+高阶智能驾驶辅助,魏牌开启“0焦虑智能电动”新赛道
- 智能手机|全球第17位!App Annie报告:2021年中国人均每天用手机3.3小时
- 图灵奖|中国科技团队创历史,360打破行业垄断,登顶世界最强人工智能榜
- 图灵奖|“世界最强”人工智能榜单,“中国代表队”力压群雄登顶榜首